Neues Jahr, neuer Build! In diesem Beitrag zeigen wir euch, wie man eine 5-Zoll HD FPV Drohne für cinematische Aufnahmen und Freestyle zusammenbaut und was man dafür alles benötigt.
Alle verwendeten Teile gibt es natürlich bei uns im Shop und es hilft uns enorm, wenn ihr da vorbeischaut. Danke!
Diesen Blog-Post gibt es auch in Form eines Videos. Einfach oben auf Play klicken oder auf unserem YouTube Kanal vorbeischauen.
Für den Bau unserer FPV Drohne benötigen wir mehrere wichtige Komponenten. Zu den Grundbausteinen gehören der Frame, der die Struktur der Drohne bildet, und der Empfänger, der die Steuerungssignale empfängt. Vier Motoren treiben die Propeller an, während der Videosender und die Kamera das Livebild an die FPV-Brille übertragen. Der Flugcontroller, das „Gehirn“ der Drohne, und der Regler, der die Stromzufuhr zu den Motoren steuert, sind ebenfalls notwendig.
Diese Komponenten benötigst du um eine FPV Drohne zu bauen:

Um das Videobild zu empfangen, empfehlen wir die Walksnail Avatar Goggles X, eine der beliebtesten HD FPV-Brillen. Für die Fernsteuerung nutzen wir die Jumper T20 V2. Welche Funke ihr genau verwendet ist aber nicht so weichtig. Sie muss aber das Übertragungsprotokoll ELRS unterstützen. Der verwendete Akku ist ein 6S-LiPo-Akku von China Hobbyline, da wir einen 6S-kompatiblen Kopter bauen.
Dieses Equipment haben wir verwendet:
Für den Bau benötigt ihr auch eine Auswahl an Werkzeugen. Ein Lötkolben ist unerlässlich, vorzugsweise eine richtige Lötstation, sowie Lötzinn. Zum Schrumpfen der Schrumpfschläuche kann man ein Feuerzeug oder eine Heißluftpistole verwenden. Kabelbinder sind praktisch für diverse Anwendungen, ebenso wie eine Abisolierzange für größere Kabel, ein Seitenschneider und eine kleine Spitzzange für kleinere Kabel. Zum Montieren der Propeller benötigt ihr ein Prop-Tool. In dem praktischen Ethix-Toolcase ist das wichtigste Werkzeug bereits enthalten.
Sinnvolles Werkzeug für jeden FPV-Piloten:
Nachdem wir das geklärt haben, geht es jetzt ans Bauen der FPV Drohne.
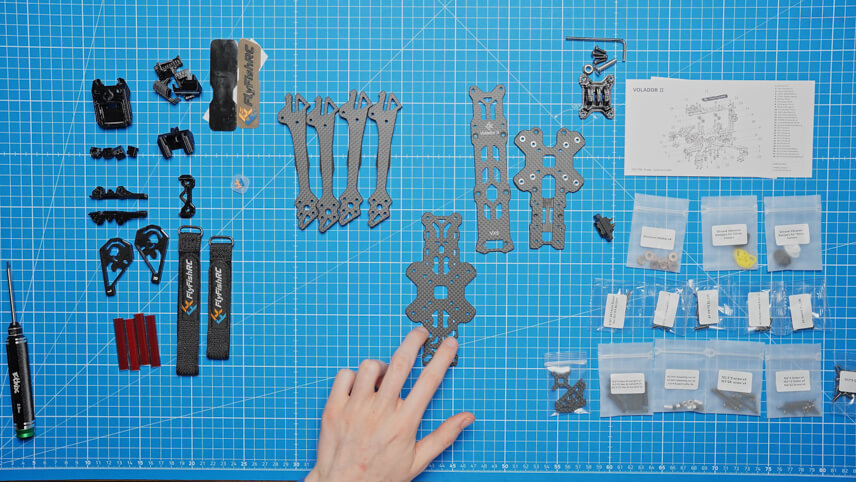
Beginnen wir mit dem Aufbau des Frames. Zuerst packt ihr alle Teile aus, um eine gute Übersicht zu haben. Legt die vier Arme des Frames so aus, dass sie in der Mitte ein Kreuz bilden. Ein kleines Plus-Teil hilft dabei, die Arme in der Mitte zu fixieren, wodurch das spätere Verschrauben erleichtert wird. Drückt dieses Plus-Teil fest in die Mitte, damit die Arme eng aneinander liegen.
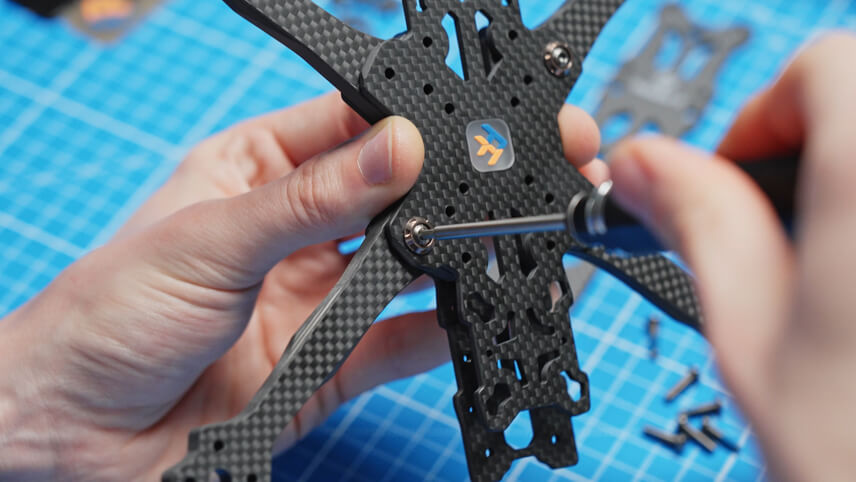
Für die Befestigung der Arme benötigt ihr M3x12-Schrauben. Dreht den Kopter um und achtet darauf, das FlyFish-Logo richtig zu platzieren. Nutzt Aluminium-Unterlegscheiben, um die Arme zu befestigen. Zuerst werden die äußeren Löcher verwendet, danach die längeren M3x28-Schrauben für die inneren Löcher. Diese Schrauben lasst ihr zunächst locker, bis alle Schrauben montiert sind, dann zieht ihr sie fest.
Sobald alle Schrauben fest sind, kommen die ersten 3D-gedruckten TPU-Teile ins Spiel. Als erstes montiert ihr eine Antennenhalterung hinten. Nutzt M2x12-Schrauben und einen 1,5 mm Sechskantschraubendreher, um die Halterung von unten in den Frame zu schrauben. Auch hier gilt: Alles locker lassen und erst am Ende festziehen.
Als nächstes montieren wir die Kamerahalterung. Diese besteht aus zwei Carbonplatten, zwei Aluminiumteilen und einer kleinen TPU-Lippe. Zuerst drückt ihr die Carbonplatten in den Frame. Dann befestigt ihr die Aluminiumteile an den Carbonplatten, aber schraubt sie nur locker fest, damit die Kamera noch dazwischen passt.

Die Standoffs, die Abstandshalter für die verschiedenen Ebenen des Frames, kommen nun an die Reihe. Es gibt verschiedene Größen: große, etwas kleinere und ganz kleine für die GPS-Halterung. Zuerst befestigt ihr die großen Standoffs mit M3x16-Schrauben von oben im Frame. Zwei kommen in die Mitte des Frames und zwei weitere nach hinten. Die kleineren Standoffs, die ihr mit M2,5x9-Schrauben befestigt, kommen nach hinten.
Nun bereiten wir die Motoren vor. Wir verwenden iFlight Xing2 2306er Motoren mit 1755 KV. Zuerst drückt ihr die TPU-Armschützer auf die Arme des Frames, um das Carbon und die Motoren zu schützen. Dann nehmt ihr einen Motor, haltet ihn an den Arm und schraubt die ersten Schrauben langsam fest. Achtet darauf, dass der Motor gerade auf dem Arm sitzt, damit das Gewinde nicht beschädigt wird. Außerdem solltet ihr darauf achten, dass die Schrauben nicht die Motorwindungen berühren. Wiederholt diesen Schritt für alle vier Motoren.

Jetzt kommen der Flugcontroller und der Regler an die Reihe. Zuerst holt ihr alles aus der Verpackung: den XT60-Stecker, die Schrauben, Ersatzkabel und Silikondämpfer. Der Regler, auch ESC genannt, ist der Chip, an den alle Motoren angeschlossen werden. Der Flugcontroller ist das „Gehirn“ der Drohne, an dem später alle Komponenten angeschlossen werden.
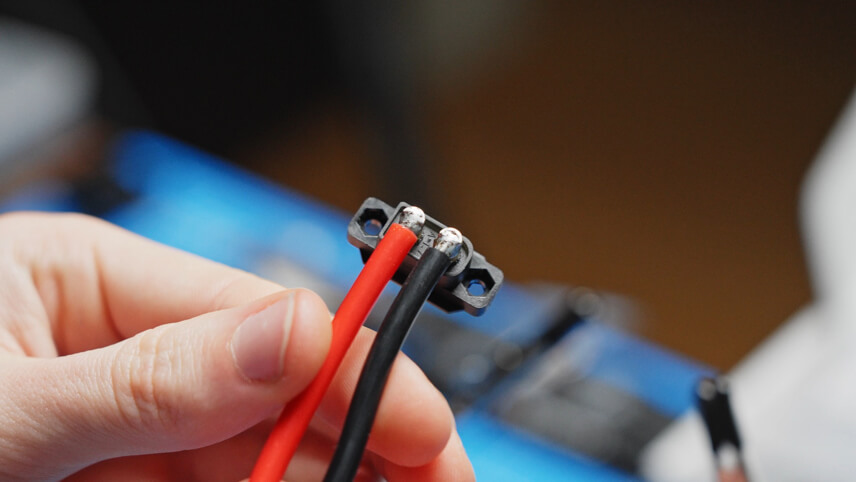
Um die Kabel des XT60-Anschlusses in einem 90°-Winkel anzuschließen, löten wir zunächst die Kontakte des Steckers vor. Wir nutzen übrigens den XT60 Anschluss, der beim Frame dabei war.
Die Kabel werden ebenfalls vorverzinnt. Danach verlötet ihr die Kabel an den Kontakten des XT60-Anschlusses. Achtet darauf, dass sich zwischen den beiden Kontakten nichts berührt.
Der Kondensator wird von unten in den Frame platziert, mit Plus an Plus und Minus an Minus verlötet. Wir mussten uns noch einen (baugrößentechnisch) kleineren Kondensator besorgen, da der vom ESC nicht in den Frame passt.
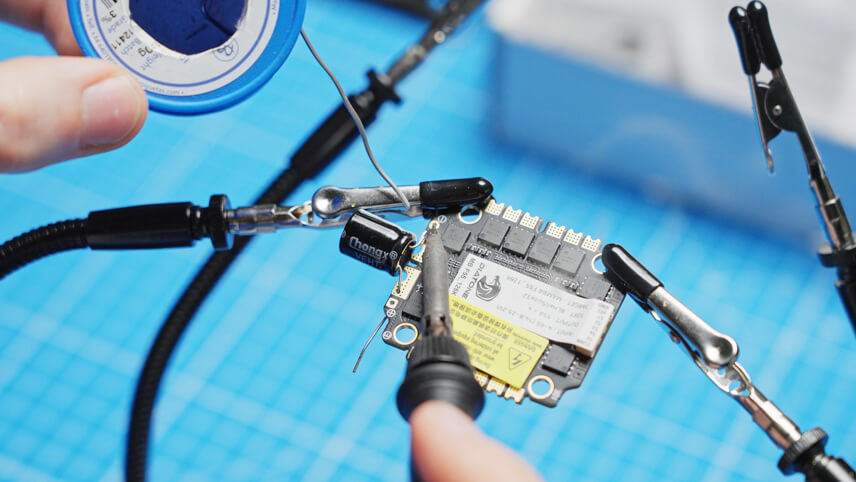
Schneidet die überstehenden Beinchen des Kondensators ab. Dann könnt ihr die Lötstellen für die Stromkabel am ESC vorbereiten und die Stromkabel ebenfalls verlöten.
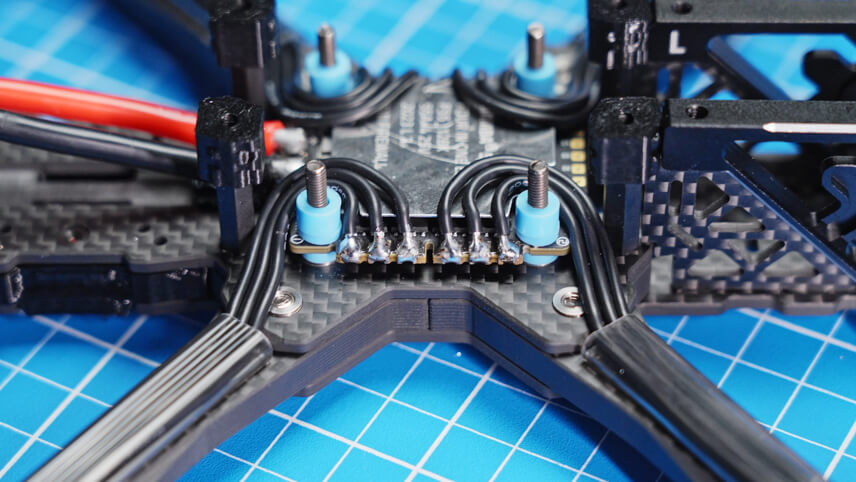
Jetzt montieren wir den ESC im Frame. Dazu werden die Silikondämpfer durch die Löcher im Frame gezogen. Die drei Anschlüsse pro Motor werden vorgelötet. Dann bringt ihr die Motorkabelschützer an und steckt die Kabel durch diese Schützer, bevor ihr sie an den ESC lötet. Wichtig ist, dass sich die Kabel nicht berühren und nur mit dem jeweiligen Lötpad in Verbindung stehen.
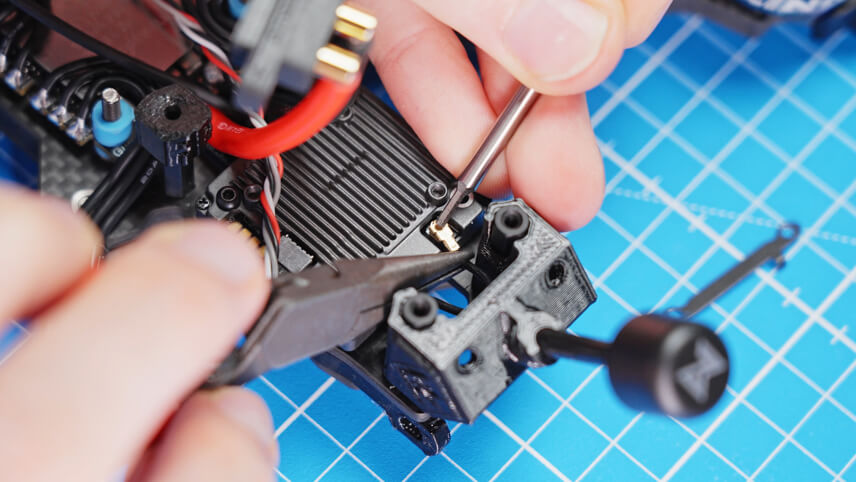
Als nächstes ist das Videosendersystem dran. Wir benutzen das Walksnail Avatar HD Kit V2, bestehend aus Antenne, Videosender und Kamera. Der Videosender wird hinten im Frame montiert, die Kamera kommt nach vorne. Die Kabel werden so verlegt, dass der Videosender richtig positioniert werden kann. Nutzt die mitgelieferten Schrauben und Unterlegscheiben, um den Videosender festzuschrauben.
Entfernt die Abdeckplatte des Videosenders, um den U.FL-Anschluss freizulegen. Befestigt die Antenne in der Halterung und schließt die Antenne am Videosender an. Montiert die Platte wieder und zieht die Schrauben fest.
Um den Videosender mit dem Flugcontroller zu verbinden, lötet ihr das rote Kabel an das 9V-Pad, das schwarze Kabel an das GND-Pad, das graue TX-Kabel an das RX3-Pad und das weiße RX-Kabel an das TX3-Pad des Flugcontrollers. Achtet darauf, dass RX und TX korrekt angeschlossen sind, um eine reibungslose Kommunikation zu gewährleisten. Das genaue Schema könnt ihr der Anleitung des FC und des Videosenders entnehmen.
Nun ist der Videosender fertig installiert und der XT60-Anschluss kann hinten auf die Standoffs gedrückt werden.
Setzt die Silikondämpfer seitlich in den Flugcontroller und verbindet das Kabel des Reglers mit dem Flugcontroller. Montiert den Flugcontroller im Frame und befestigt ihn mit den beiliegenden Muttern.
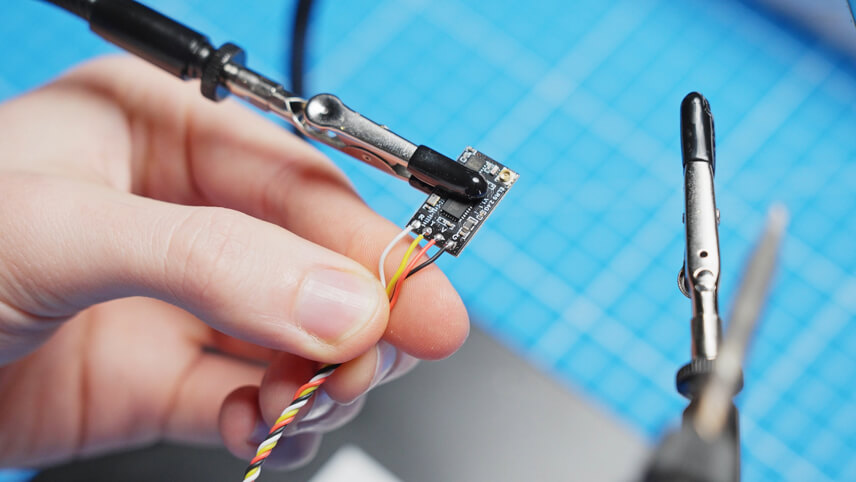
Jetzt wird der Empfänger eingebaut. Wir verwenden einen ELRS Empfänger, der ähnlich wie der Videosender angeschlossen wird. Schaut in die Anleitung, um die richtige Belegung der Anschlüsse zu finden. Normalerweise sind die Anschlüsse GND (schwarz), 5V (rot), TX (grau) und RX (weiß). Diese Kabel werden an den UART1-Anschluss des Flugcontrollers gelötet: TX an RX, RX an TX, 5V an 5V und GND an GND. Das Schrumpfschlauch schützt sowohl das Board als auch die Kabel. Den Empfänger montiert ihr hinter der Kamera, indem ihr die Antenne unter der Kamera herzieht und alles mit Kabelbindern befestigt. Alternativ könnt ihr doppelseitiges Klebeband verwenden.
Im nächsten Schritt montieren wir die Topplatte. Dazu werden verschiedene Schrauben verwendet: hinten die M2,5-Schrauben, in der Mitte die Senkkopfschrauben und vorne Schrauben mit breiterem Kopf für die GoPro-Halterung. Diese speziellen Schrauben verhindern, dass das TPU beim Absturz herausreißt. Zieht alle Schrauben fest, aber übertreibt es nicht, um Beschädigungen zu vermeiden. Montiert auch das Akkupad, indem ihr es richtig ausrichtet und festdrückt, um ein Verrutschen des Akkus zu verhindern.
Bevor wir zur Softwarekonfiguration übergehen, testen wir die Elektronik. Schließt einen Smoke Stopper zwischen Akku und Drohne an, um eventuelle Fehlanschlüsse zu erkennen, ohne die Komponenten zu beschädigen. Wenn alle LEDs auf dem Empfänger, dem Flugcontroller und dem Videosender aufleuchten, seid ihr bereit für die Konfiguration.

Für die Einrichtung des Kopters benötigt ihr am Computer zwei Programme: den ExpressLRS Konfigurator für den Empfänger und den Betaflight Konfigurator für den Flugcontroller.
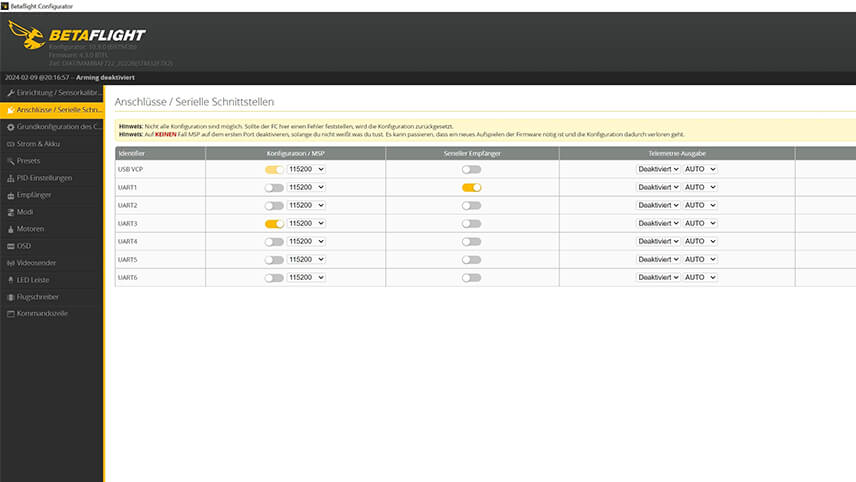
Startet mit Betaflight. Verbindet euch mit dem Flugcontroller und stellt sicher, dass der Empfänger auf UART1 und der Videosender auf UART3 eingestellt ist. Aktiviert die entsprechenden Anschlüsse und speichert die Konfiguration.
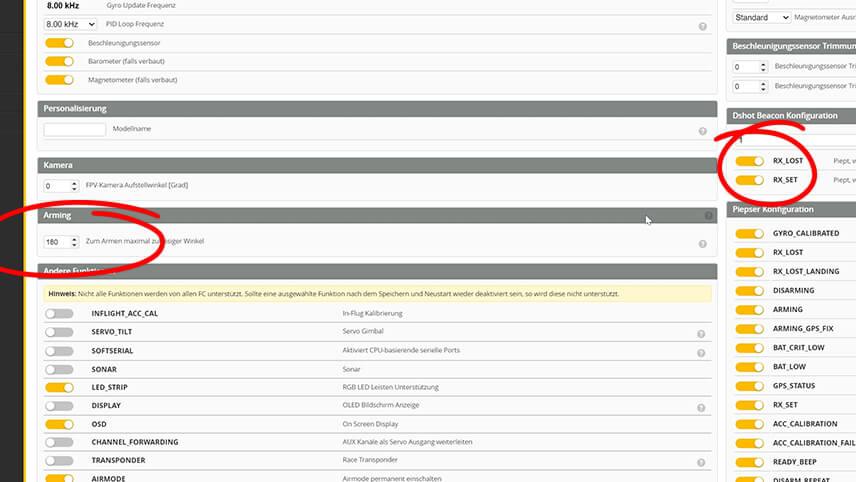
In der Grundkonfiguration setzt ihr den Arming-Winkel auf 180°, damit die Drohne in jeder Richtung starten kann. Aktiviert RX_LOST und RX_SET, damit die Motoren piepen, wenn die Verbindung verloren geht. Speichert die Einstellungen. Unter „Empfänger“ wählt ihr CRSF, das Protokoll der ELRS-Empfänger.
Wechselt zum ExpressLRS Konfigurator. Wählt die richtige Version und den passenden Empfänger aus. Verbindet euch und installiert die Firmware. Dies kann einige Minuten dauern. Wenn die Installation erfolgreich war, könnt ihr zurück zu Betaflight wechseln und die Verbindung testen. Bewegt die Sticks auf der Fernsteuerung und prüft, ob die Ausschläge in Betaflight sichtbar sind.
Wechselt zu den Flugmodi in Betaflight und fügt den Pre-Arm-, Arm- und Angle-Modus hinzu. Weist die entsprechenden Schalter auf eurer Fernsteuerung zu, indem ihr auf "Bereich hinzufügen" klickt und die Schalter bewegt. Stellt sicher, dass die Bereiche korrekt gesetzt sind, sodass die Modi nur aktiv sind, wenn die Schalter umgelegt sind. Speichert die Einstellungen und testet, ob die Schalter in Betaflight korrekt angezeigt werden, wenn ihr sie auf der Fernsteuerung bewegt.
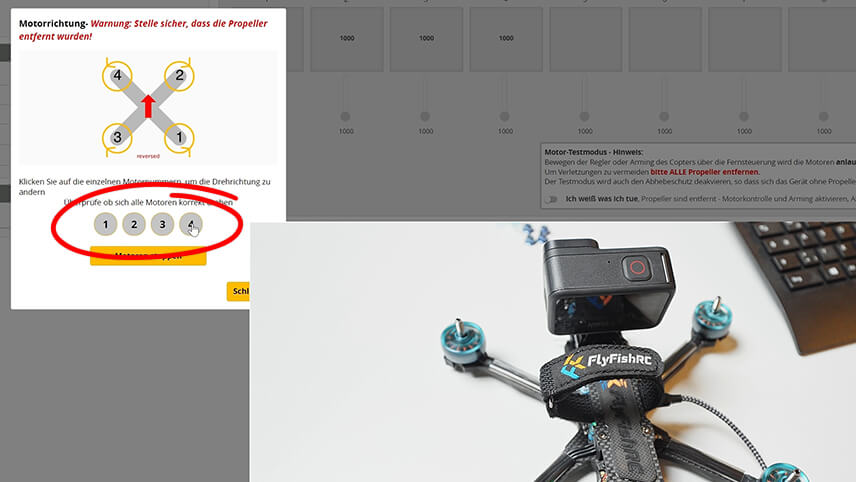
Im "Motoren"-Tab von Betaflight überprüft ihr die Drehrichtung der Motoren. Stellt sicher, dass die Propeller abgenommen sind und aktiviert den Schalter, der die Motorensteuerung freischaltet. Verbindet den Akku und setzt das Häkchen bei "Motoren umkehren". Denn wir wollen die Props-Out-Drehrichtung. Testet die Drehrichtung der Motoren und klickt auf die Nummer des jeweiligen Motors, um die Drehrichtung zu ändern, falls sie nicht korrekt ist. Speichert die Einstellungen und stellt sicher, dass sich alle Motoren wie vorgesehen drehen.
Im OSD (On-Screen Display) stellt ihr die Elemente ein, die in der Brille angezeigt werden sollen. Aktiviert die durchschnittliche Zellspannung, den Flugmodus, Timer 1 und 2, sowie den RSSI-Wert und die Verbindungsqualität. Stellt das Videoformat auf HD, um die Elemente an den richtigen Stellen anzuzeigen.
Zum Abschluss müssen noch die Brille und der Videosender verbunden werden. Schaltet die Drohne ein und wartet, bis der Videosender grün blinkt. Drückt dann den kleinen Knopf am Videosender und an der Brille, bis beide verbunden sind.

Zum Schluss montiert ihr die Propeller. Wir verwenden Gemfan Hurricane Propeller in Blau. Ordnet die Propeller so zu, dass sie nach außen drehen, um keinen Schmutz in die Kamera zu werfen. Das entspricht der zuvor festgelegten Motordrehrichtung. Befestigt die Propeller mit den beiliegenden Muttern und zieht sie mit dem Prop-Tool fest.

Jetzt seid ihr bereit für den ersten Testflug! Schaltet die Fernsteuerung ein, versorgt die Brille mit Strom und schließt den Akku an die Drohne an. Überprüft im Flug das Geräusch der Drohne und achtet darauf, keine ungewöhnlichen Vibrationen zu hören. Behaltet die Akkuspannung im Auge, um den Akku nicht zu tief zu entladen. Wenn alles gut läuft, habt ihr erfolgreich eure eigene FPV Drohne gebaut!
Wenn ihr weitere Tipps für euren ersten Flug benötigt, schaut euch unser Video dazu an. Alle Teile und Werkzeuge findet ihr bei uns im Shop. Viel Spaß beim Fliegen und lasst uns gerne ein Like und ein Abo da!