
La afición FPV (vista en primera persona) ofrece a los pilotos de drones y RC la fascinante oportunidad de controlar sus aeronaves como si estuvieran ellos mismos sentados en la cabina. Para ello, la tecnología de vídeo desempeña un papel fundamental: una cámara montada en el aparato transmite la imagen al piloto en tiempo real, lo que le permite controlar la aeronave desde una perspectiva en primera persona. Esta experiencia inmersiva es lo que hace tan atractivo el vuelo FPV y requiere una señal de vídeo fiable y estable para mantener un control preciso.
En el panorama actual del FPV, los sistemas de vídeo digital han eclipsado en gran medida a los sistemas analógicos que antes se utilizaban de forma generalizada. Los sistemas FPV digitales ofrecen claras ventajas, sobre todo en términos de calidad de imagen significativamente superior y transmisión estable y resistente a las interferencias. Los sistemas digitales más conocidos, como los de DJI o Walksnail, ofrecen imágenes nítidas de 720p o incluso 1080p y permiten una conexión muy estable a largas distancias. Estos sistemas digitales no sólo han demostrado su eficacia en el sector del freestyle, sino también en vuelos de largo alcance, donde la fiabilidad de la transmisión es crucial.
Sin embargo, siempre hay enfoques innovadores para seguir desarrollando la tecnología de transmisión de vídeo en la afición FPV. Uno de estos interesantes desarrollos es OpenIPC. OpenIPC es un firmware de código abierto desarrollado originalmente para cámaras IP y que ahora se está aplicando al FPV. Aunque todavía está en fase de desarrollo y actualmente no alcanza el mismo nivel de rendimiento que los sistemas comerciales, ofrece una interesante oportunidad para hacer que el hobby sea aún más abierto.
En teoría, las cámaras basadas en IP ofrecen una gran flexibilidad: permiten una personalización y unas configuraciones individuales que a menudo no son posibles con los sistemas comerciales. Además, OpenIPC podría ser en el futuro una alternativa rentable y continuamente mejorada por la comunidad. es similar al protocolo de control ExpressLRS (ELRS). Sin embargo, la tecnología aún no está lo suficientemente madura como para sacar el máximo partido de la experiencia FPV. Sobre todo en aspectos como la latencia y la estabilidad, aún hay que progresar para estar a la altura de los sistemas establecidos.
No obstante, OpenIPC muestra el potencial de los proyectos de código abierto para influir en el mercado de la FPV y crear alternativas para que los pilotos personalicen e individualicen sus sistemas.
Aunque OpenIPC aún está en fase de desarrollo como firmware de código abierto, ya existen algunos productos FPV interesantes que pueden utilizarse en combinación con este software. Dos productos en particular han causado revuelo en la comunidad FPV: EMAX Wyvern Link y RunCam WiFiLink. Ambos sistemas se basan en OpenIPC, lo que los convierte en opciones interesantes para los pilotos FPV con ganas de experimentar.
Nota: Actualmente sólo existen versiones alfa de los sistemas presentados a continuación. No esperes un producto de alta calidad y sin defectos. Los fabricantes sacan estos sistemas al mercado para dar a más gente la oportunidad de seguir desarrollando sistemas OpenIPC. Y no para vender un producto perfecto.
EMAX Wyvern Link es un transmisor (VTX) y receptor (VRX) de vídeo digital compatible con OpenIPC diseñado para pilotos FPV que buscan una alternativa asequible a los sistemas FPV digitales propietarios. El receptor ofrece una potencia máxima de transmisión de hasta 2W en la versión más potente, lo que en combinación con el transmisor más potente (800mW) debería permitir un alcance y estabilidad significativos en la señal de vídeo. Y sí, el receptor también transmite con sistemas digitales y viceversa. Por eso, como ya ha dicho Joshua Bardwell, preferimos llamar Groundunit al receptor y Airunit al transmisor.
Hasta ahora, EMAX es también el único fabricante del sector FPV que ofrece cuatro productos OpenIPC diferentes. Además de los componentes de alto rendimiento descritos anteriormente, también se incluyen productos más baratos que probablemente se utilicen para copters más pequeños que requieran menos potencia para la transmisión.
Actualmente, la calidad de imagen está limitada a 720p (120 fps) a unos 4 Mbps, lo que es notablemente inferior en comparación con los sistemas de alta resolución de DJI o Walksnail (25-50 Mbps). Esto provoca bloqueos en las escenas de movimiento rápido y reduce la nitidez de la imagen durante las maniobras rápidas.

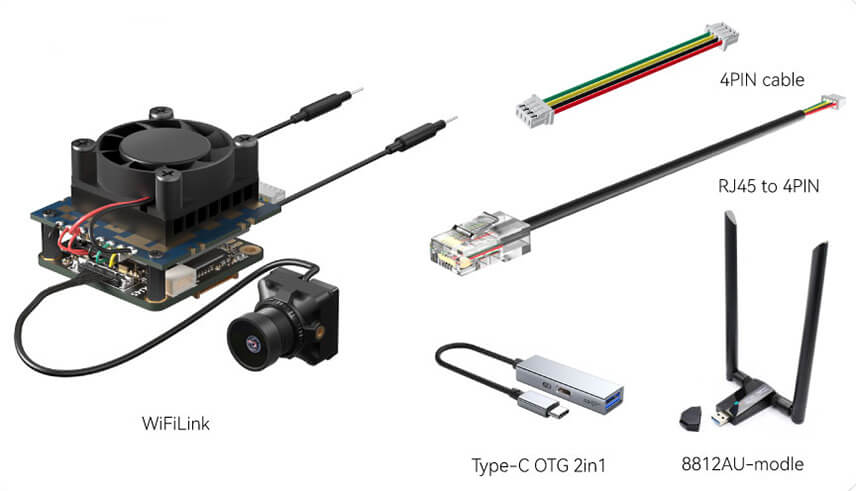
RunCam WiFiLink es otro producto compatible con OpenIPC que se basa en la tecnología de transmisión de vídeo por WiFi. En términos de tecnología de transmisión, es muy similar al sistema EMAX, pero también ofrece la opción de transmisión Full HD. Sin embargo, la frecuencia de imagen se reduce a 60 fps.
Al igual que EMAX, el sistema aún no es adecuado para aplicaciones profesionales, ya que las soluciones basadas en WiFi son más susceptibles a los problemas de latencia y a las interrupciones de señal que las conexiones inalámbricas tradicionales de 5,8 GHz.
Con RunCam WiFiLink, la estación de tierra también tiene un aspecto ligeramente distinto al de EMAX. La recepción se realiza a través de un módulo WiFi "clásico", que se conecta a un smartphone mediante USB OTG y reproduce la imagen recibida.
En general, OpenIPC ofrece una latencia aceptable de unos 25 ms, que se acerca a la de DJI FPV V1. Para los pilotos que quieran experimentar más allá de la tecnología, EMAX y RunCam ofrecen plataformas tan prometedoras, pero actualmente no funcionan con el mismo nivel de estabilidad que los sistemas establecidos.
Para contribuir al desarrollo de OpenIPC, la comunidad puede participar de varias maneras:
Los usuarios pueden instalar OpenIPC en dispositivos compatibles y probarlo a fondo. Los comentarios sobre errores, fluctuaciones de rendimiento o posibles mejoras son esenciales para optimizar el firmware. Estos comentarios pueden compartirse directamente en plataformas como GitHub o foros especiales de FPV.
Cualquier persona con experiencia en programación (especialmente en C, C++ o Python) puede contribuir activamente a mejorar el código. OpenIPC es un proyecto de código abierto accesible públicamente en GitHub. Los desarrolladores pueden añadir nuevas funciones, corregir errores existentes y mejorar la documentación.
El apoyo mediante contribuciones económicas ayuda al equipo de OpenIPC a impulsar el desarrollo, realizar pruebas de hardware y cubrir los costes del servidor.
La participación en foros, redes sociales y grupos de Discord ayuda a difundir conocimientos y a prestar apoyo a otros usuarios durante la instalación y el uso. Este tipo de mantenimiento comunitario es esencial para crear una comunidad de usuarios cada vez mayor.
En conclusión, estamos emocionados por ver a dónde nos llevará el viaje de los sistemas OpenIPC en el mundo FPV. Qué productos habrá, qué fabricantes se subirán al carro y cómo de competitivos serán los productos OpenIPC frente a sistemas ya establecidos como DJI o Walksnail. Quizás los productos estén pronto disponibles en nuestra tienda.
Fuentes: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











