Nowy rok, nowa konstrukcja! W tym artykule pokażemy, jak złożyć 5-calowego drona HD FPV do ujęć filmowych i freestyle'u oraz co jest do tego potrzebne.
Wszystkie użyte części są oczywiście dostępne w naszym sklepie i bardzo nam to pomoże, jeśli do nas zajrzysz. Dziękujemy!
Ten wpis na blogu jest również dostępny w formie wideo. Wystarczy kliknąć przycisk odtwarzania powyżej lub zajrzeć na nasz kanał YouTube.
Do zbudowania naszego drona FPV potrzebujemy kilku ważnych komponentów. Podstawowe bloki konstrukcyjne obejmują ramę, która tworzy strukturę drona, oraz odbiornik, który odbiera sygnały sterujące. Cztery silniki napędzają śmigła, podczas gdy nadajnik wideo i kamera przesyłają obraz na żywo do gogli FPV. Niezbędny jest również kontroler lotu, "mózg" drona, oraz kontroler, który steruje zasilaniem silników.
Do zbudowania drona FPV potrzebne są następujące komponenty:

Do odbioru obrazu wideo polecamy Walksnail Avatar Goggles X, jedne z najpopularniejszych gogli HD FPV. Do zdalnego sterowania używamy Jumper T20 V2. Wybór radia nie ma większego znaczenia. Musi ono jednak obsługiwać protokół transmisji ELRS. Używana bateria to 6S LiPo od China Hobbyline, ponieważ budujemy helikopter kompatybilny z 6S.
Oto sprzęt, którego użyliśmy:
Do budowy potrzebny będzie również wybór narzędzi. Niezbędna jest lutownica, najlepiej odpowiednia stacja lutownicza, a także lut. Do obkurczania rurek termokurczliwych można użyć zapalniczki lub opalarki. Opaski kablowe są praktyczne w różnych zastosowaniach, podobnie jak obcinaczki do większych kabli, obcinaki boczne i małe szczypce do mniejszych kabli. Do montażu śmigieł potrzebne będzie narzędzie. Najważniejsze narzędzie jest już zawarte w praktycznej walizce narzędziowej Ethix.
Przydatne narzędzie dla każdego pilota FPV:
Teraz, gdy mamy to już za sobą, nadszedł czas na zbudowanie drona FPV.
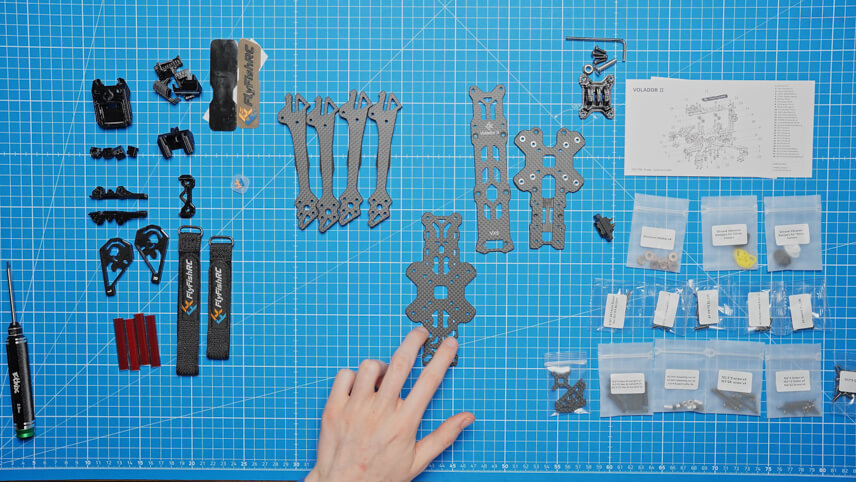
Zacznijmy od złożenia ramy. Najpierw rozpakuj wszystkie części, aby uzyskać dobry przegląd. Ułóż cztery ramiona ramy tak, aby tworzyły krzyż pośrodku. Mała dodatkowa część pomaga zamocować ramiona na środku, co ułatwia ich późniejsze skręcenie. Wciśnij ten element mocno w środek, tak aby ramiona były blisko siebie.
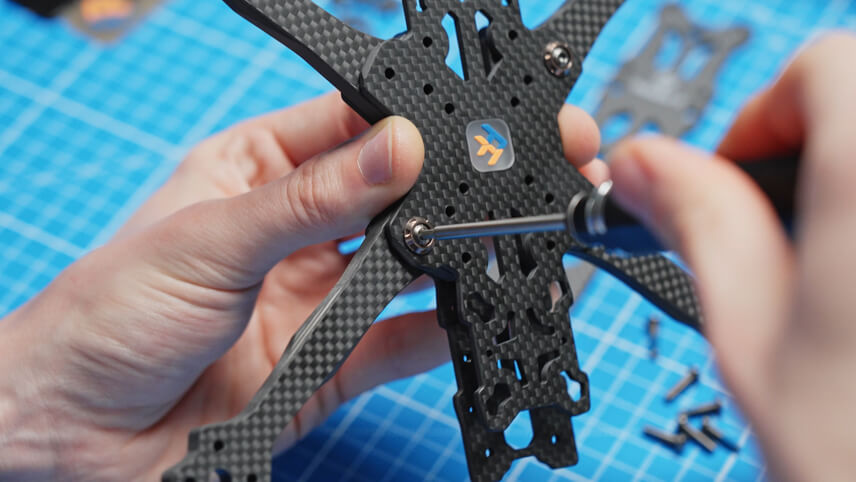
Do przymocowania ramion potrzebne będą śruby M3x12. Odwróć helikopter i upewnij się, że logo FlyFish jest prawidłowo umieszczone. Do zamocowania ramion użyj aluminiowych podkładek. Najpierw użyj zewnętrznych otworów, a następnie dłuższych śrub M3x28 do wewnętrznych otworów. Pozostaw te śruby luźne do momentu zamontowania wszystkich śrub, a następnie dokręć je.
Gdy tylko wszystkie śruby zostaną dokręcone, do gry wchodzą pierwsze części TPU wydrukowane w 3D. Najpierw zamontuj wspornik anteny z tyłu. Użyj śrub M2x12 i śrubokręta sześciokątnego 1,5 mm, aby przykręcić wspornik do ramy od dołu. Ponownie, pozostaw wszystko luźne i dokręć dopiero na końcu.
Następnie montujemy uchwyt kamery. Składa się on z dwóch karbonowych płytek, dwóch aluminiowych części i małej wargi TPU. Najpierw wciśnij płytki węglowe do ramy. Następnie przymocuj aluminiowe części do płyt węglowych, ale przykręć je tylko luźno, aby kamera nadal mieściła się między nimi.

Teraz nadszedł czas na elementy dystansowe, przekładki dla różnych poziomów ramy. Dostępne są różne rozmiary: duże, nieco mniejsze i bardzo małe do mocowania GPS. Najpierw przymocuj duże elementy dystansowe do ramy od góry za pomocą śrub M3x16. Dwa są umieszczone na środku ramy, a dwa kolejne z tyłu. Mniejsze wsporniki, które mocuje się za pomocą śrub M2,5x9, znajdują się z tyłu.
Teraz przygotowujemy silniki. Używamy silników iFlight Xing2 2306 o napięciu 1755 KV. Najpierw wciśnij ochraniacze ramion TPU na ramiona ramy, aby chronić węgiel i silniki. Następnie weź silnik, przytrzymaj go na ramieniu i powoli dokręć pierwsze śruby. Upewnij się, że silnik siedzi prosto na ramieniu, aby nie uszkodzić gwintu. Należy również upewnić się, że śruby nie dotykają uzwojeń silnika. Powtórz ten krok dla wszystkich czterech silników.

Teraz kolej na kontroler lotu i ESC. Najpierw wyjmij wszystko z opakowania: złącze XT60, śruby, zapasowe kable i silikonowe amortyzatory. Kontroler, znany również jako ESC, to chip, do którego podłączone są wszystkie silniki. Kontroler lotu jest "mózgiem" drona, do którego później podłączane są wszystkie komponenty.
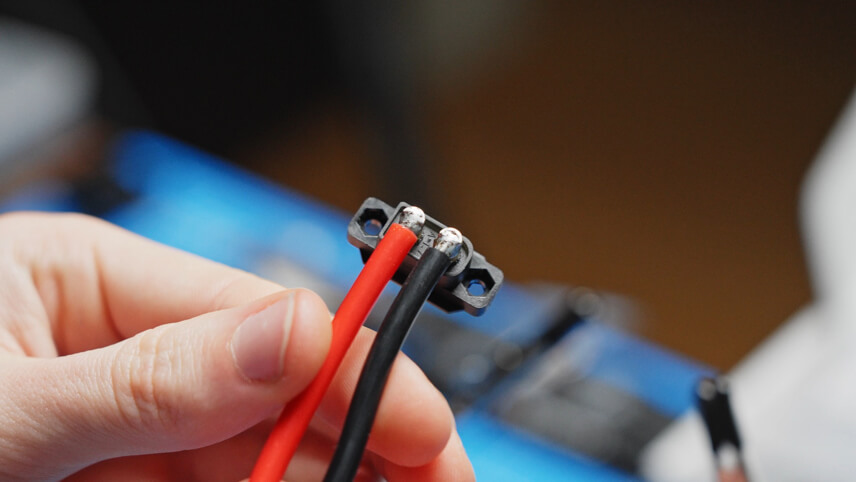
Aby podłączyć kable złącza XT60 pod kątem 90°, najpierw lutujemy wstępnie styki złącza. Nawiasem mówiąc, używamy złącza XT60 dostarczonego z ramą.
Kable są również wstępnie ocynowane. Następnie przylutuj kable do styków złącza XT60. Upewnij się, że nic nie styka się między dwoma stykami.
Kondensator jest umieszczany w ramce od dołu, z plusem przylutowanym do plusa i minusem do minusa. Musieliśmy kupić mniejszy kondensator (pod względem rozmiaru), ponieważ ten z ESC nie pasuje do ramy.
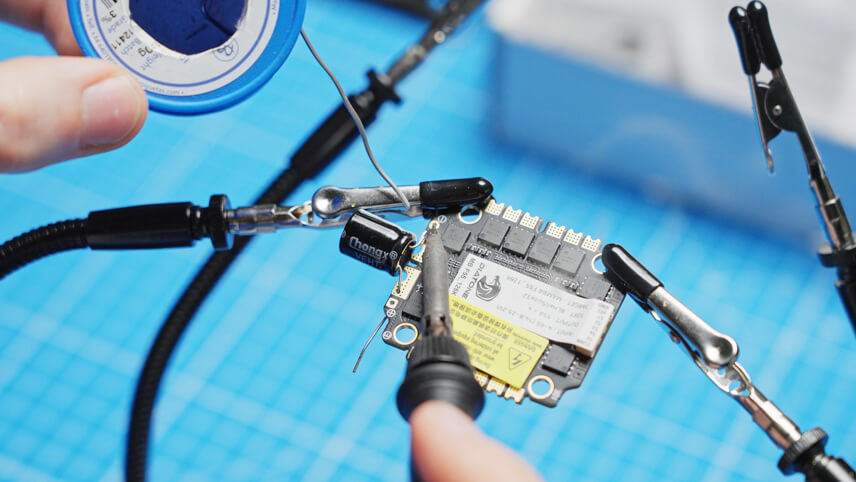
Odcinamy wystające nóżki kondensatora. Następnie można przygotować punkty lutownicze dla kabli zasilających na ESC i przylutować również kable zasilające.
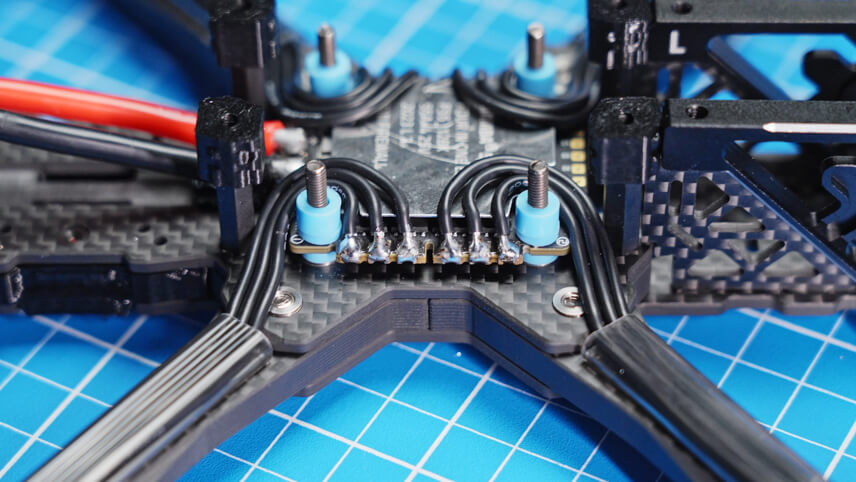
Teraz montujemy ESC w ramie. W tym celu należy przeciągnąć silikonowe amortyzatory przez otwory w ramie. Trzy połączenia na silnik są wstępnie przylutowane. Następnie przymocuj osłony kabli silnika i przepchnij kable przez te osłony przed przylutowaniem ich do ESC. Ważne jest, aby kable nie stykały się ze sobą i były podłączone tylko do odpowiedniego pola lutowniczego.
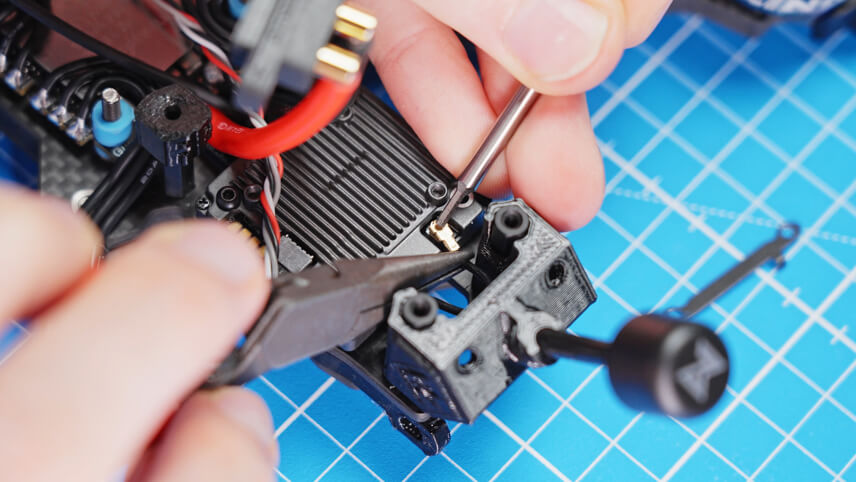
Następnym krokiem jest system nadajnika wideo. Używamy zestawu Walksnail Avatar HD Kit V2, składającego się z anteny, nadajnika wideo i kamery. Nadajnik wideo jest zamontowany z tyłu ramy, a kamera z przodu. Kable są ułożone tak, aby nadajnik wideo mógł być prawidłowo ustawiony. Do przykręcenia nadajnika wideo użyj dostarczonych śrub i podkładek.
Zdejmij pokrywę nadajnika wideo, aby odsłonić złącze U.FL. Przymocuj antenę do wspornika i podłącz antenę do nadajnika wideo. Ponownie załóż płytkę i dokręć śruby.
Aby podłączyć nadajnik wideo do kontrolera lotu, przylutuj czerwony kabel do gniazda 9V, czarny kabel do gniazda GND, szary kabel TX do gniazda RX3 i biały kabel RX do gniazda TX3 kontrolera lotu. Upewnij się, że RX i TX są prawidłowo podłączone, aby zapewnić płynną komunikację. Dokładny schemat można znaleźć w instrukcji FC i nadajnika wideo.
Nadajnik wideo jest teraz w pełni zainstalowany, a złącze XT60 można wcisnąć na wsporniki z tyłu.
Włóż silikonowe amortyzatory z boku kontrolera lotu i podłącz kabel kontrolera do kontrolera lotu. Zamontuj kontroler lotu w ramie i zabezpiecz go dostarczonymi nakrętkami.
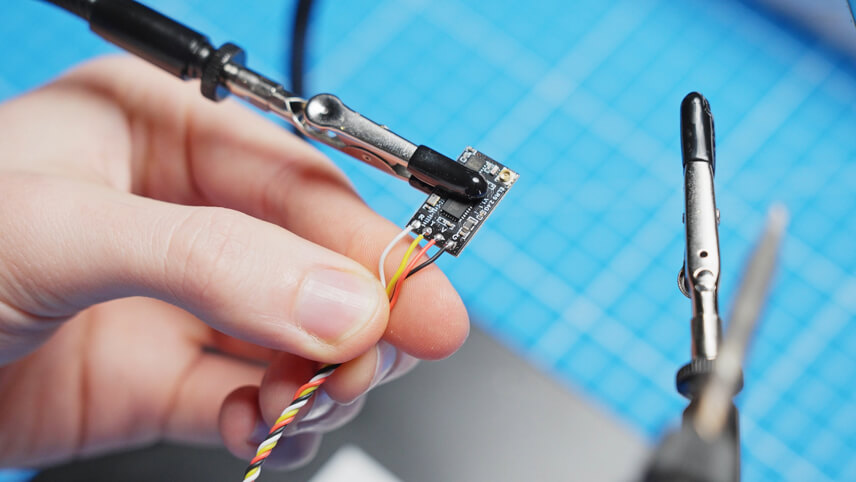
Teraz należy zainstalować odbiornik. Używamy odbiornika ELRS, który jest podłączany w podobny sposób jak nadajnik wideo. Aby znaleźć prawidłowe przypisanie połączeń, należy zapoznać się z instrukcją. Zwykle połączenia to GND (czarny), 5V (czerwony), TX (szary) i RX (biały). Kable te są przylutowane do złącza UART1 kontrolera lotu: TX do RX, RX do TX, 5V do 5V i GND do GND. Rurki termokurczliwe chronią zarówno płytkę, jak i kable. Zamontuj odbiornik za kamerą, przeciągając antenę pod kamerą i zabezpieczając wszystko opaskami kablowymi. Alternatywnie można użyć dwustronnej taśmy klejącej.
Następnym krokiem jest zamontowanie górnej płyty. Używane są do tego różne śruby: śruby M2.5 z tyłu, śruby z łbem stożkowym pośrodku i śruby z szerszym łbem do mocowania GoPro z przodu. Te specjalne śruby zapobiegają wyrwaniu TPU w razie upadku. Dokręć wszystkie śruby, ale nie przesadzaj, aby uniknąć uszkodzenia. Zamontuj również podkładkę pod baterię, ustawiając ją prawidłowo i dociskając, aby zapobiec ześlizgnięciu się baterii.
Zanim przejdziemy do konfiguracji oprogramowania, przetestujmy elektronikę. Podłącz korek dymny między baterią a dronem, aby wykryć wszelkie nieprawidłowe połączenia bez uszkadzania komponentów. Gdy wszystkie diody LED na odbiorniku, kontrolerze lotu i nadajniku wideo zaświecą się, jesteś gotowy do konfiguracji.

Do skonfigurowania drona potrzebne będą dwa programy na komputerze: konfigurator ExpressLRS dla odbiornika i konfigurator Betaflight dla kontrolera lotu.
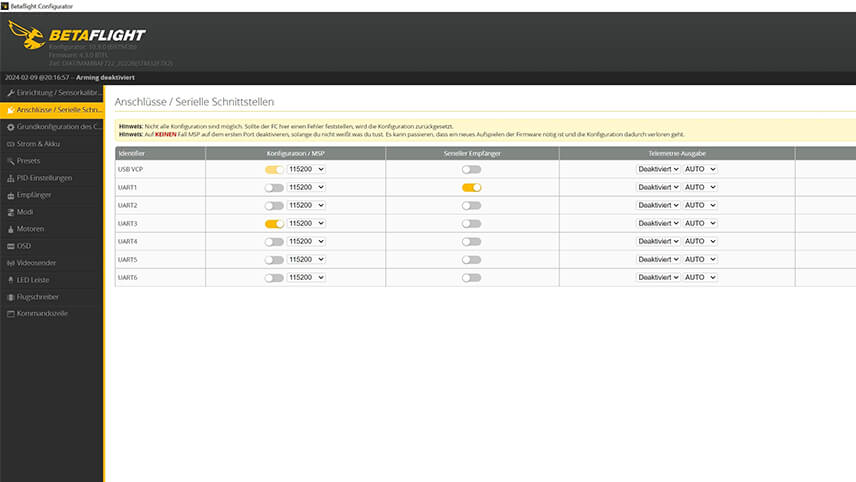
Zacznij od Betaflight. Połącz się z kontrolerem lotu i upewnij się, że odbiornik jest ustawiony na UART1, a nadajnik wideo na UART3. Aktywuj odpowiednie połączenia i zapisz konfigurację.
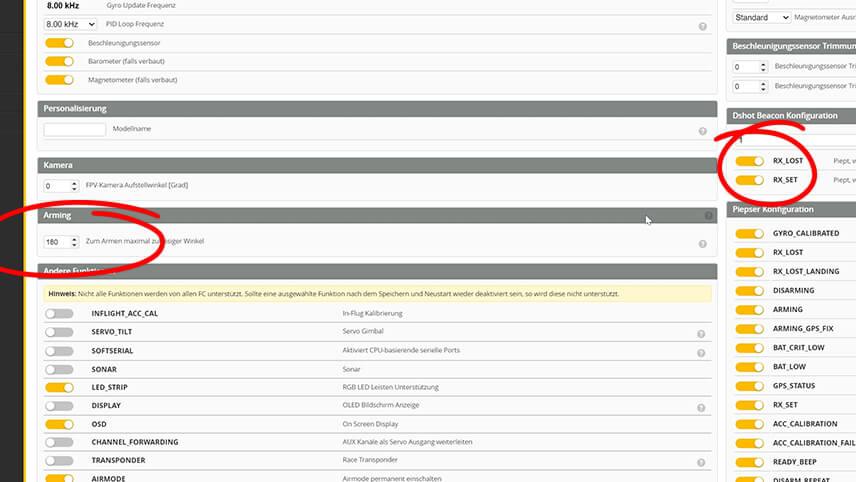
W podstawowej konfiguracji ustaw kąt uzbrojenia na 180°, aby dron mógł wystartować w dowolnym kierunku. Aktywuj RX_LOST i RX_SET, aby silniki emitowały sygnał dźwiękowy w przypadku utraty połączenia. Zapisz ustawienia. W sekcji "Odbiornik" wybierz CRSF, protokół odbiornika ELRS.
Przejdź do konfiguratora ExpressLRS. Wybierz prawidłową wersję i odpowiedni odbiornik. Połącz się i zainstaluj oprogramowanie sprzętowe. Może to potrwać kilka minut. Jeśli instalacja przebiegła pomyślnie, możesz wrócić do Betaflight i przetestować połączenie. Poruszaj drążkami na pilocie i sprawdź, czy ugięcia są widoczne w Betaflight.
Przejdź do trybów lotu w Betaflight i dodaj tryby Pre-Arm, Arm i Angle. Przypisz odpowiednie przełączniki na pilocie, klikając "Dodaj zakres" i przesuwając przełączniki. Upewnij się, że zakresy są ustawione prawidłowo, aby tryby były aktywne tylko po przełączeniu przełączników. Zapisz ustawienia i sprawdź, czy przełączniki są prawidłowo wyświetlane w Betaflight po przesunięciu ich na pilocie.
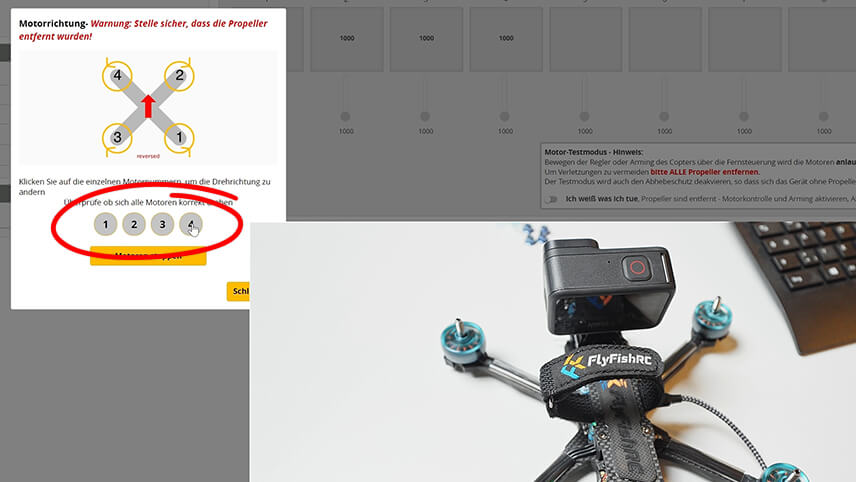
W zakładce "Silniki" w Betaflight sprawdź kierunek obrotów silników. Upewnij się, że śmigła są zdjęte i aktywuj przełącznik, który włącza sterowanie silnikiem. Podłącz akumulator i zaznacz pole "Reverse motors". Ponieważ chcemy, aby śmigła obracały się w przeciwnym kierunku. Przetestuj kierunek obrotów silników i kliknij numer odpowiedniego silnika, aby zmienić kierunek obrotów, jeśli nie jest prawidłowy. Zapisz ustawienia i upewnij się, że wszystkie silniki obracają się zgodnie z przeznaczeniem.
W OSD (On-Screen Display) ustaw elementy, które mają być wyświetlane w goglach. Aktywuj średnie napięcie ogniwa, tryb lotu, timer 1 i 2, a także wartość RSSI i jakość połączenia. Ustaw format wideo na HD, aby wyświetlać elementy we właściwych miejscach.
Na koniec należy podłączyć gogle i nadajnik wideo. Włącz drona i poczekaj, aż nadajnik wideo zacznie migać na zielono. Następnie naciśnij mały przycisk na nadajniku wideo i na goglach, aż oba elementy zostaną połączone.

Na koniec zamontuj śmigła. Używamy śmigieł Gemfan Hurricane w kolorze niebieskim. Ułóż śmigła tak, aby obracały się na zewnątrz, aby uniknąć wrzucania brudu do kamery. Odpowiada to wcześniej ustalonemu kierunkowi obrotów silnika. Przymocuj śmigła za pomocą dołączonych nakrętek i dokręć je za pomocą narzędzia do śmigieł.

Teraz jesteś gotowy do pierwszego lotu testowego! Włącz pilota, zasil gogle i podłącz akumulator do drona. sprawdź dźwięk drona podczas lotu i upewnij się, że nie słyszysz żadnych nietypowych wibracji. Miej oko na napięcie baterii, aby nie rozładować jej zbyt głęboko. Jeśli wszystko pójdzie dobrze, z powodzeniem zbudowałeś własnego drona FPV!
Jeśli potrzebujesz więcej wskazówek dotyczących pierwszego lotu, obejrzyj nasz film. Wszystkie części i narzędzia można znaleźć w naszym sklepie. Miłego latania i prosimy o polubienie i subskrypcję!