
L'hobby dell'FPV (first-person view) offre ai piloti di droni e RC l'affascinante opportunità di controllare il proprio aereo come se fossero seduti nella cabina di pilotaggio. La tecnologia video svolge un ruolo centrale: una telecamera montata sul dispositivo trasmette l'immagine al pilota in tempo reale, consentendogli di controllare il velivolo da una prospettiva in prima persona. Questa esperienza coinvolgente è ciò che rende il volo FPV così affascinante e richiede un segnale video affidabile e stabile per mantenere un controllo preciso.
Nell'attuale panorama dell'FPV, i sistemi video digitali hanno superato di gran lunga i sistemi analogici un tempo ampiamente utilizzati. I sistemi FPV digitali offrono chiari vantaggi, in particolare in termini di qualità dell'immagine notevolmente superiore e di trasmissione stabile e resistente alle interferenze. I sistemi digitali più noti, come quelli di DJI o Walksnail, offrono immagini nitidissime a 720p o addirittura 1080p e consentono una connessione molto stabile su lunghe distanze. Questi sistemi digitali si sono affermati non solo nel settore del freestyle, ma anche nei voli a lungo raggio, dove l'affidabilità della trasmissione è fondamentale.
Tuttavia, ci sono sempre approcci innovativi per sviluppare ulteriormente la tecnologia di trasmissione video nell'hobby FPV. Uno di questi interessanti sviluppi è OpenIPC. OpenIPC è un firmware open source originariamente sviluppato per le telecamere IP e ora applicato all'FPV. Sebbene sia ancora in fase di sviluppo e non raggiunga attualmente lo stesso livello di prestazioni dei sistemi commerciali, offre un'interessante opportunità per rendere l'hobby ancora più aperto.
Le telecamere basate su IP offrono teoricamente una grande flessibilità: consentono personalizzazioni e configurazioni individuali che spesso non sono possibili con i sistemi commerciali. Inoltre, OpenIPC potrebbe rappresentare in futuro un'alternativa economicamente vantaggiosa e continuamente migliorata dalla comunità. è simile al protocollo di controllo ExpressLRS (ELRS). Tuttavia, la tecnologia non è ancora abbastanza matura per ottenere il massimo dall'esperienza FPV. In particolare, in aree come la latenza e la stabilità, devono ancora essere compiuti progressi per tenere il passo con i sistemi consolidati.
Tuttavia, OpenIPC mostra il potenziale di come i progetti open source possano influenzare il mercato FPV e creare modi alternativi per i piloti di personalizzare i propri sistemi.
Sebbene OpenIPC sia ancora in fase di sviluppo come firmware open source, esistono già alcuni interessanti prodotti FPV che possono essere utilizzati in combinazione con questo software. Due prodotti in particolare hanno fatto scalpore nella comunità FPV: EMAX Wyvern Link e RunCam WiFiLink. Entrambi i sistemi sono basati su OpenIPC, il che li rende opzioni interessanti per i piloti FPV desiderosi di sperimentare.
Nota: attualmente esistono solo versioni alfa dei sistemi presentati di seguito. Non ci si deve aspettare un prodotto di alta qualità e senza difetti. I produttori stanno immettendo sul mercato questi sistemi per dare a più persone l'opportunità di sviluppare ulteriormente i sistemi OpenIPC. E non per vendere un prodotto perfetto.
EMAX Wyvern Link è un trasmettitore (VTX) e ricevitore (VRX) digitale compatibile con OpenIPC, progettato per i piloti FPV che cercano un'alternativa economica ai sistemi FPV digitali proprietari. Il ricevitore offre una potenza di trasmissione massima di 2W nella versione più potente, che in combinazione con il trasmettitore più potente (800mW) dovrebbe consentire una notevole portata e stabilità del segnale video. E sì, il ricevitore trasmette anche con sistemi digitali e viceversa. Ecco perché, come ha già detto Joshua Bardwell, preferiamo chiamare il ricevitore Groundunit e il trasmettitore Airunit.
Finora, EMAX è anche l'unico produttore nel settore FPV a offrire quattro diversi prodotti OpenIPC. Oltre ai componenti ad alte prestazioni descritti in precedenza, si tratta anche di prodotti più economici che verranno probabilmente utilizzati per elicotteri più piccoli che richiedono meno potenza per la trasmissione.
La qualità dell'immagine è attualmente limitata a 720p (120fps) a circa 4 Mbps, che è notevolmente inferiore rispetto ai sistemi ad alta risoluzione di DJI o Walksnail (25-50 Mbps). Questo comporta un blocco nelle scene in rapido movimento e riduce la nitidezza dell'immagine durante le manovre veloci.

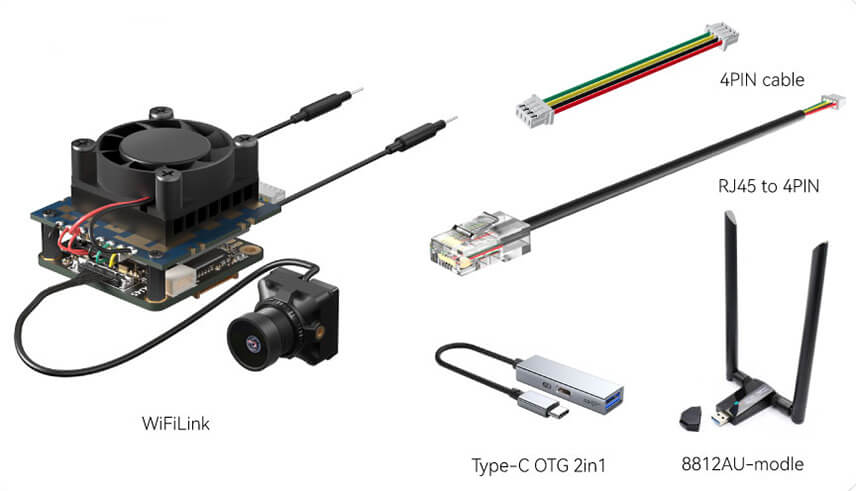
RunCam WiFiLink è un altro prodotto compatibile con OpenIPC che si basa sulla tecnologia di streaming video WiFi. In termini di tecnologia di trasmissione, è molto simile al sistema EMAX, ma offre anche l'opzione di trasmissione Full HD. Tuttavia, la frequenza dei fotogrammi viene ridotta a 60 fps.
Come nel caso di EMAX, il sistema non è ancora adatto ad applicazioni professionali, in quanto le soluzioni basate su WiFi sono più soggette a problemi di latenza e caduta del segnale rispetto alle tradizionali connessioni wireless a 5,8 GHz.
Con RunCam WiFiLink, anche la stazione di terra ha un aspetto leggermente diverso da EMAX. La ricezione avviene tramite un modulo WiFi "classico", che viene collegato a uno smartphone tramite USB OTG e riproduce l'immagine ricevuta.
Nel complesso, OpenIPC offre una latenza accettabile di circa 25 ms, che si avvicina a quella del DJI FPV V1. Per i piloti che vogliono sperimentare di più al di là della tecnologia, EMAX e RunCam offrono piattaforme promettenti, ma attualmente non operano allo stesso livello di stabilità dei sistemi consolidati.
Per contribuire allo sviluppo di OpenIPC, la comunità può essere coinvolta in vari modi:
Gli utenti possono installare OpenIPC su dispositivi compatibili e testarlo a fondo. Il feedback su bug, fluttuazioni delle prestazioni o potenziali miglioramenti è essenziale per ottimizzare il firmware. Tali feedback possono essere condivisi direttamente su piattaforme come GitHub o forum FPV speciali.
Chiunque abbia esperienza di programmazione (soprattutto in C, C++ o Python) può contribuire attivamente al miglioramento del codice. OpenIPC è un progetto open source pubblicamente accessibile su GitHub. Gli sviluppatori possono aggiungere nuove funzionalità, correggere i bug esistenti e migliorare la documentazione.
Il sostegno tramite contributi finanziari aiuta il team di OpenIPC a portare avanti lo sviluppo, a effettuare test hardware e a coprire i costi dei server.
La partecipazione a forum, social network e gruppi Discord aiuta a diffondere le conoscenze e a supportare gli altri utenti durante l'installazione e l'utilizzo. Questo tipo di manutenzione della comunità è essenziale per creare una comunità di utenti in crescita.
In conclusione, siamo ansiosi di vedere dove ci porterà il viaggio dei sistemi OpenIPC nel mondo FPV. Quali prodotti ci saranno, quali produttori salteranno sul carro e quanto i prodotti OpenIPC saranno competitivi rispetto a sistemi già affermati come DJI o Walksnail. Forse i prodotti saranno presto disponibili nel nostro negozio.
Fonti: OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX
Du möchtest immer auf dem Laufenden bleiben? Dann abonniere jetzt unseren FPV24 Newsletter!
Rabatte, Angebote, News und neue Produkte. Jetzt kostenlos für den FPV Newsletter anmelden.











