Anno nuovo, costruzione nuova! In questo articolo vi mostreremo come assemblare un drone FPV HD da 5 pollici per riprese cinematografiche e freestyle e cosa vi serve.
Tutte le parti utilizzate sono ovviamente disponibili nel nostro negozio e ci aiuta enormemente se passate a trovarci. Grazie!
Questo post è disponibile anche come video. Basta cliccare su play qui sopra o dare un'occhiata al nostro canale YouTube.
Per costruire il nostro drone FPV abbiamo bisogno di diversi componenti importanti. Gli elementi di base sono il telaio, che costituisce la struttura del drone, e il ricevitore, che riceve i segnali di controllo. Quattro motori azionano le eliche, mentre il trasmettitore video e la telecamera trasmettono l'immagine in diretta agli occhiali FPV. Sono necessari anche il flight controller, il "cervello" del drone, e il controller, che controlla l'alimentazione dei motori.
Per costruire un drone FPV sono necessari questi componenti:

Per ricevere l'immagine video, consigliamo i Walksnail Avatar Goggles X, uno dei più popolari occhiali FPV HD. Per il controllo remoto utilizziamo il Jumper T20 V2. Quale radio utilizzare esattamente non è così importante. Tuttavia, deve supportare il protocollo di trasmissione ELRS. La batteria utilizzata è una batteria LiPo 6S della Cina Hobbyline, poiché stiamo costruendo un copter compatibile con 6S.
Questo è l'equipaggiamento che abbiamo utilizzato:
Per la costruzione è necessaria una serie di strumenti. Un saldatore è essenziale, preferibilmente una stazione di saldatura adeguata, così come lo stagno. Per la termoretrazione del tubo termorestringente si può usare un accendino o una pistola termica. Le fascette sono pratiche per varie applicazioni, così come le pinze spelafili per i cavi più grandi, le tronchesi e le pinze ad ago per i cavi più piccoli. Per montare le eliche è necessario un attrezzo per eliche. L'attrezzo più importante è già incluso nella pratica valigetta Ethix.
Uno strumento utile per ogni pilota FPV:
Ora che ci siamo tolti questo sfizio, è il momento di costruire il drone FPV.
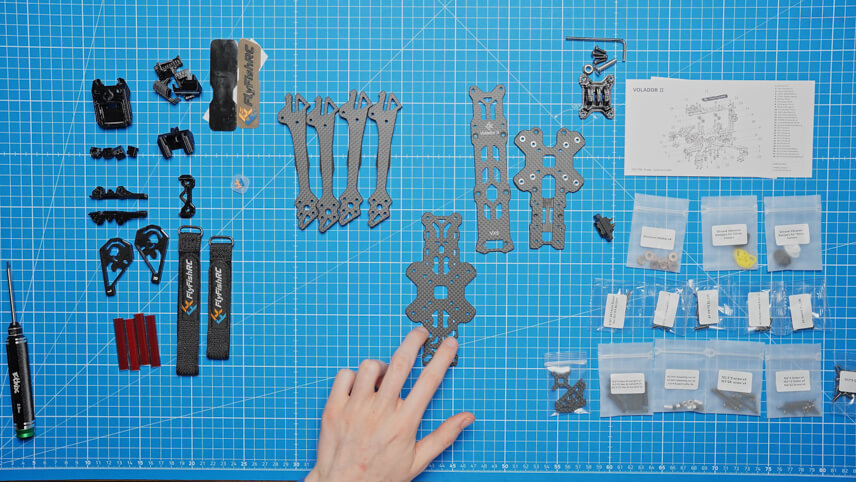
Iniziamo con l'assemblare il telaio. Innanzitutto, disimballate tutte le parti per avere una buona panoramica. Disporre i quattro bracci del telaio in modo che formino una croce al centro. Una piccola parte aggiuntiva aiuta a fissare i bracci al centro, rendendo più facile l'avvitamento successivo. Premete con forza questo pezzo in più al centro, in modo che i bracci siano vicini tra loro.
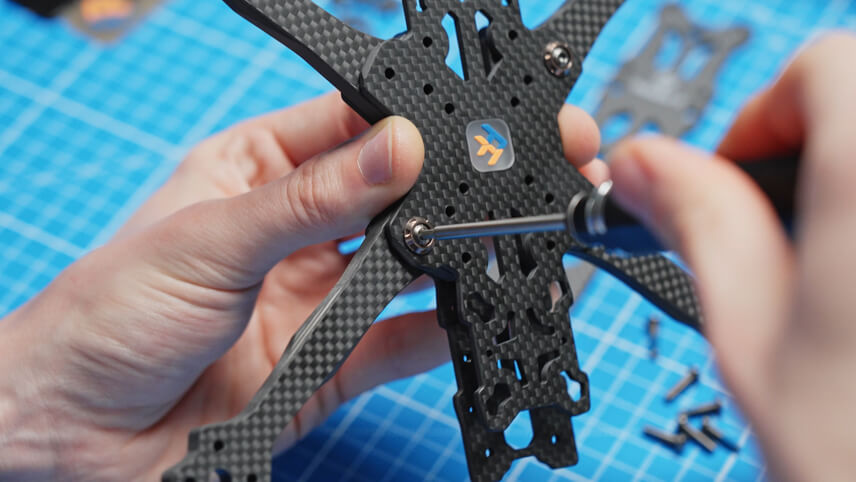
Per fissare i bracci sono necessarie viti M3x12. Girate l'elicottero e assicuratevi che il logo FlyFish sia posizionato correttamente. Per fissare i bracci, utilizzare delle rondelle di alluminio. Utilizzare prima i fori esterni e poi le viti M3x28 più lunghe per i fori interni. Lasciare queste viti allentate finché non sono state montate tutte, quindi serrarle.
Non appena tutte le viti sono serrate, entrano in gioco le prime parti in TPU stampate in 3D. Per prima cosa, montare una staffa per l'antenna sul retro. Utilizzare viti M2x12 e un cacciavite esagonale da 1,5 mm per avvitare la staffa al telaio dal basso. Anche in questo caso, lasciare tutto allentato e stringere solo alla fine.
Successivamente, montiamo il supporto della fotocamera. È composto da due piastre in carbonio, due parti in alluminio e un piccolo labbro in TPU. Per prima cosa premere le piastre di carbonio nel telaio. Quindi, fissare le parti in alluminio alle piastre in carbonio, avvitandole solo leggermente in modo che la fotocamera possa ancora inserirsi tra di esse.

Ora è il momento dei distanziatori, i distanziatori per i diversi livelli del telaio. Ci sono diverse misure: grandi, leggermente più piccoli e molto piccoli per il supporto del GPS. Per prima cosa, fissare i distanziatori grandi al telaio dall'alto con viti M3x16. Due sono posizionati al centro del telaio e altri due sul retro. I distanziatori più piccoli, fissati con viti M2,5x9, vanno sul retro.
Ora prepariamo i motori. Utilizziamo motori iFlight Xing2 2306 con 1755 KV. Per prima cosa premere le protezioni dei bracci in TPU sui bracci del telaio per proteggere il carbonio e i motori. Quindi prendere un motore, tenerlo sul braccio e stringere lentamente le prime viti. Assicurarsi che il motore sia posizionato dritto sul braccio in modo da non danneggiare la filettatura. Inoltre, bisogna assicurarsi che le viti non tocchino gli avvolgimenti del motore. Ripetere questa operazione per tutti e quattro i motori.

Ora è il turno del controller di volo e dell'ESC. Per prima cosa togliere tutto dalla confezione: il connettore XT60, le viti, i cavi di ricambio e gli ammortizzatori in silicone. Il controller, noto anche come ESC, è il chip a cui sono collegati tutti i motori. Il controller di volo è il "cervello" del drone, al quale vengono successivamente collegati tutti i componenti.
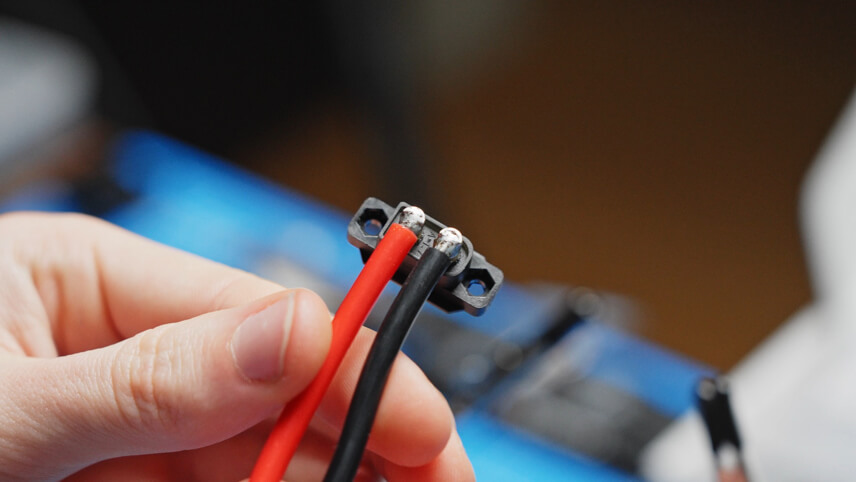
Per collegare i cavi del connettore XT60 con un angolo di 90°, dobbiamo prima pre-saldare i contatti del connettore. Per inciso, utilizziamo il connettore XT60 fornito con il telaio.
Anche i cavi sono pre-stagnati. Quindi saldare i cavi ai contatti del connettore XT60. Assicurarsi che nulla tocchi tra i due contatti.
Il condensatore viene inserito nel telaio dal basso, con il più saldato al più e il meno al meno. Abbiamo dovuto prendere un condensatore più piccolo (in termini di dimensioni), poiché quello del regolatore non entra nel telaio.
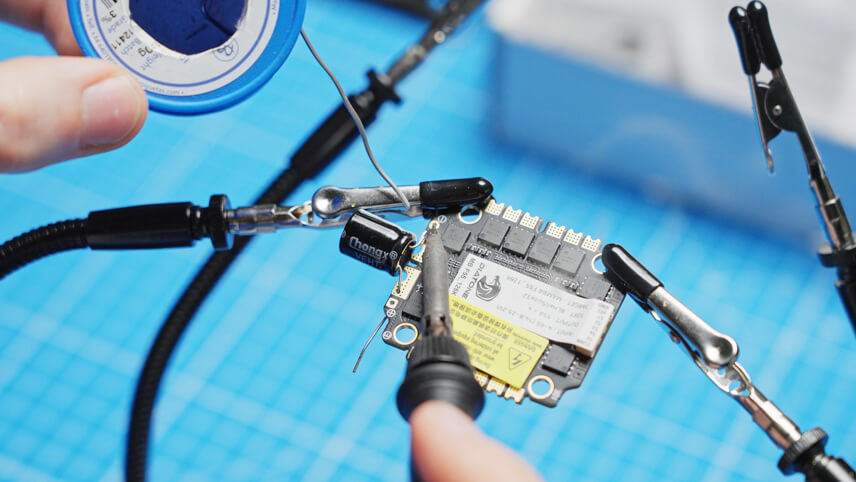
Tagliare le gambe sporgenti del condensatore. Poi si possono preparare i punti di saldatura per i cavi di alimentazione sull'ESC e saldare anche i cavi di alimentazione.
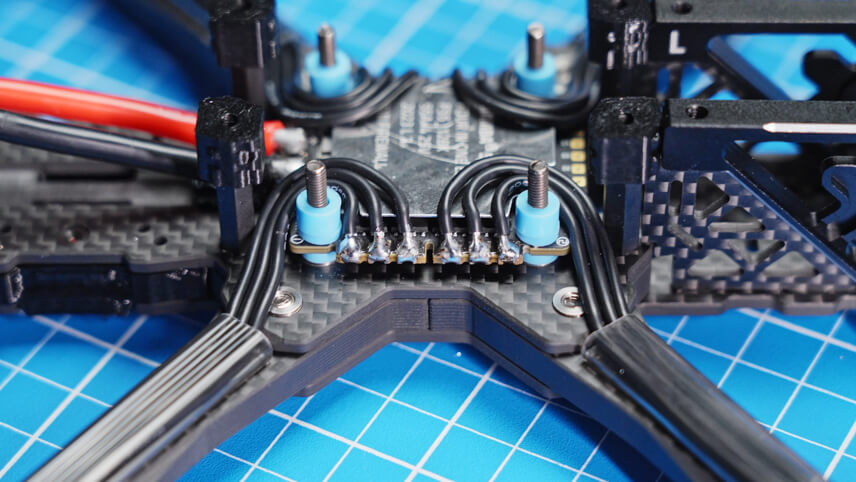
Ora montiamo il regolatore (ESC) nel telaio. A tale scopo, tirare gli ammortizzatori in silicone attraverso i fori nel telaio. Le tre connessioni per motore sono pre-saldate. Quindi fissare le protezioni dei cavi del motore e spingere i cavi attraverso queste protezioni prima di saldarli all'ESC. È importante che i cavi non si tocchino tra loro e che siano collegati solo alla rispettiva piazzola di saldatura.
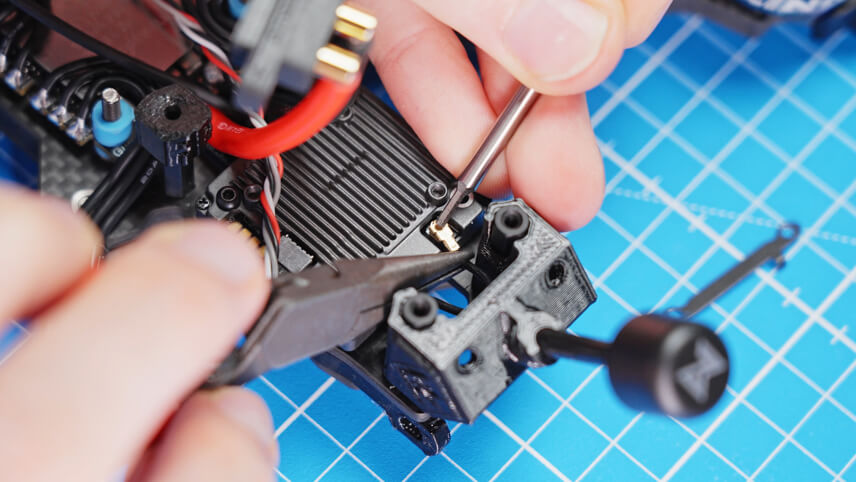
Il prossimo passo è il sistema di trasmissione video. Utilizziamo il Walksnail Avatar HD Kit V2, composto da antenna, trasmettitore video e telecamera. Il trasmettitore video è montato sul retro del telaio e la telecamera sul davanti. I cavi sono posati in modo che il trasmettitore video possa essere posizionato correttamente. Per avvitare il trasmettitore video, utilizzare le viti e le rondelle in dotazione.
Rimuovere la piastra di copertura del trasmettitore video per esporre il collegamento U.FL. Fissare l'antenna alla staffa e collegare l'antenna al trasmettitore video. Rimontare la piastra e serrare le viti.
Per collegare il trasmettitore video al flight controller, saldare il cavo rosso alla piazzola 9V, il cavo nero alla piazzola GND, il cavo grigio TX alla piazzola RX3 e il cavo bianco RX alla piazzola TX3 del flight controller. Assicurarsi che RX e TX siano collegati correttamente per garantire una comunicazione fluida. Lo schema esatto si trova nelle istruzioni del trasmettitore FC e video.
Il trasmettitore video è ora completamente installato e il connettore XT60 può essere premuto sui distanziatori sul retro.
Inserire gli ammortizzatori in silicone nel lato del flight controller e collegare il cavo del controller al flight controller. Montare il flight controller nel telaio e fissarlo con i dadi in dotazione.
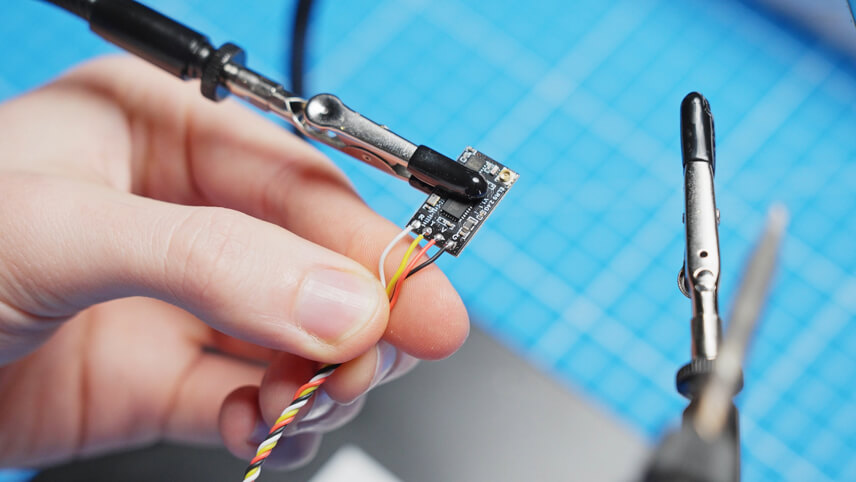
Ora si installa il ricevitore. Noi utilizziamo un ricevitore ELRS, che si collega in modo simile al trasmettitore video. Consultare le istruzioni per trovare la corretta assegnazione dei collegamenti. Normalmente i collegamenti sono GND (nero), 5V (rosso), TX (grigio) e RX (bianco). Questi cavi sono saldati alla connessione UART1 del controller di volo: TX a RX, RX a TX, 5V a 5V e GND a GND. La guaina termoretraibile protegge sia la scheda che i cavi. Montare il ricevitore dietro la telecamera tirando l'antenna sotto la telecamera e fissando il tutto con delle fascette. In alternativa, è possibile utilizzare del nastro biadesivo.
Il passo successivo è il montaggio della piastra superiore. A tale scopo si utilizzano diverse viti: viti M2,5 sul retro, viti a testa svasata al centro e viti con testa più larga per l'attacco GoPro sul davanti. Queste viti speciali impediscono al TPU di strapparsi in caso di caduta. Stringere tutte le viti, ma senza esagerare per evitare danni. Montare anche il cuscinetto della batteria allineandolo correttamente e premendolo per evitare che la batteria scivoli.
Prima di passare alla configurazione del software, testiamo l'elettronica. Collegare un tappo di fumo tra la batteria e il drone per rilevare eventuali collegamenti errati senza danneggiare i componenti. Quando tutti i LED del ricevitore, del controller di volo e del trasmettitore video si accendono, si è pronti per la configurazione.

Per configurare l'elicottero, sono necessari due programmi sul computer: il configuratore ExpressLRS per il ricevitore e il configuratore Betaflight per il controller di volo.
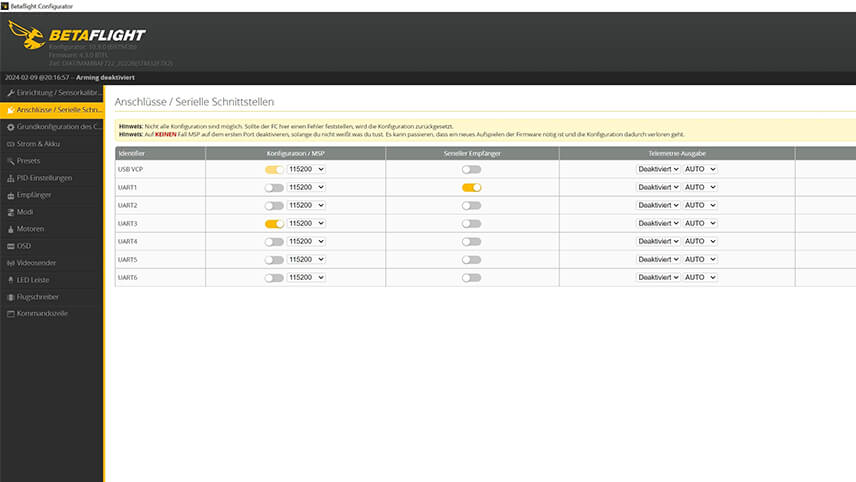
Iniziare con Betaflight. Collegatevi al flight controller e assicuratevi che il ricevitore sia impostato su UART1 e il trasmettitore video su UART3. Attivare le connessioni corrispondenti e salvare la configurazione.
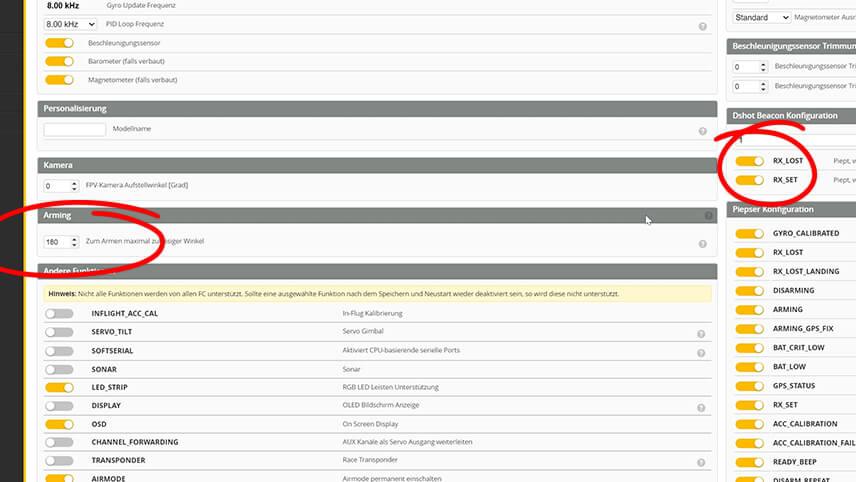
Nella configurazione di base, impostare l'angolo di armamento a 180° in modo che il drone possa decollare in qualsiasi direzione. Attivare RX_LOST e RX_SET in modo che i motori emettano un segnale acustico in caso di perdita della connessione. Salvare le impostazioni. Alla voce "Ricevitore", selezionare CRSF, il protocollo del ricevitore ELRS.
Passare al configuratore ExpressLRS. Selezionare la versione corretta e il ricevitore appropriato. Collegare e installare il firmware. L'operazione potrebbe richiedere alcuni minuti. Se l'installazione è andata a buon fine, si può tornare a Betaflight e testare la connessione. Muovere gli stick del telecomando e verificare se le deviazioni sono visibili in Betaflight.
Passare alle modalità di volo in Betaflight e aggiungere le modalità Pre-Arm, Arm e Angle. Assegnare gli interruttori corrispondenti sul telecomando facendo clic su "Add Range" e spostando gli interruttori. Assicurarsi che gli intervalli siano impostati correttamente in modo che le modalità siano attive solo quando gli interruttori vengono premuti. Salvare le impostazioni e verificare se gli interruttori vengono visualizzati correttamente in Betaflight quando li si sposta sul telecomando.
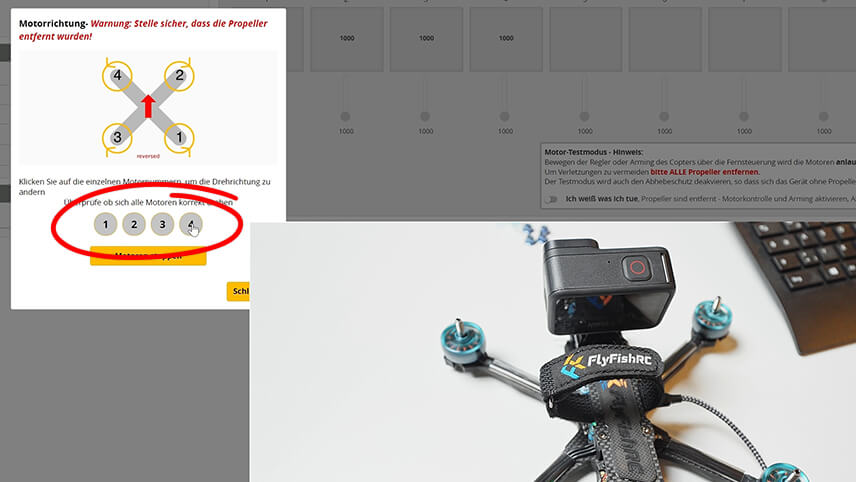
Nella scheda "Motori" di Betaflight, verificare il senso di rotazione dei motori. Assicurarsi che le eliche siano rimosse e attivare l'interruttore che abilita il controllo dei motori. Collegare la batteria e spuntare la casella "Invertire i motori". Perché vogliamo che le eliche siano fuori dal senso di rotazione. Verificare il senso di rotazione dei motori e fare clic sul numero del rispettivo motore per cambiare il senso di rotazione se non è corretto. Salvare le impostazioni e verificare che tutti i motori ruotino come previsto.
Nell'OSD (On-Screen Display), impostare gli elementi che devono essere visualizzati negli occhiali. Attivare la tensione media delle celle, la modalità di volo, il timer 1 e 2, nonché il valore RSSI e la qualità della connessione. Impostare il formato video su HD per visualizzare gli elementi nei punti giusti.
Infine, è necessario collegare gli occhiali e il trasmettitore video. Accendere il drone e attendere che il trasmettitore video lampeggi verde. Quindi premere il piccolo pulsante sul trasmettitore video e sugli occhiali finché entrambi non sono collegati.

Infine, montare le eliche. Noi utilizziamo eliche Gemfan Hurricane di colore blu. Disporre le eliche in modo che girino verso l'esterno per evitare di gettare sporcizia nella telecamera. Questo corrisponde alla direzione di rotazione del motore determinata in precedenza. Fissare le eliche con i dadi in dotazione e serrarle con l'attrezzo per eliche.

Ora siete pronti per il primo volo di prova! Accendere il telecomando, alimentare gli occhiali e collegare la batteria al drone. controllate il suono del drone in volo e assicuratevi di non sentire vibrazioni insolite. Tenete d'occhio la tensione della batteria per non scaricarla troppo. Se tutto va bene, avete costruito con successo il vostro drone FPV!
Se avete bisogno di ulteriori consigli per il vostro primo volo, date un'occhiata al nostro video. Potete trovare tutti i componenti e gli strumenti nel nostro negozio. Divertitevi a volare e lasciateci un like e un abbonamento!