
Le hobby FPV (First-Person-View) offre aux pilotes de drones et de RC la possibilité fascinante de piloter leurs appareils comme s'ils étaient eux-mêmes dans le cockpit. La technologie vidéo joue ici un rôle central : une caméra montée sur l'appareil transmet l'image en temps réel au pilote, ce qui lui permet de piloter l'appareil à la première personne. Cette expérience immersive constitue l'attrait du vol FPV et nécessite un signal vidéo fiable et stable pour maintenir un contrôle précis.
Sur la scène FPV actuelle, les systèmes vidéo numériques ont considérablement réduit les systèmes analogiques autrefois très répandus. Les systèmes FPV numériques offrent des avantages évidents, notamment une qualité d'image nettement supérieure et une transmission stable et résistante aux interférences. Les systèmes numériques connus, comme ceux de DJI ou de Walksnail, fournissent des images 720p ou même 1080p d'une grande netteté et permettent une connexion très stable sur de longues distances. Ces systèmes numériques ont fait leurs preuves non seulement dans le domaine du freestyle, mais aussi lors de vols longue distance (long-range), où une transmission fiable est décisive.
Cependant, il y a toujours des approches innovantes pour développer la technologie de transmission vidéo dans le hobby FPV. L'un de ces développements passionnants est OpenIPC. OpenIPC est un firmware open source qui a été développé à l'origine pour les caméras IP et qui est maintenant utilisé dans le domaine du FPV. Alors qu'il est encore en cours de développement et n'atteint pas actuellement le même niveau de performance que les systèmes commerciaux, il offre une possibilité intéressante de rendre le hobby encore plus ouvert.
Les caméras basées sur IP offrent théoriquement une grande flexibilité : elles permettent des adaptations et des configurations individuelles qui ne sont souvent pas possibles avec les systèmes commerciaux. De plus, OpenIPC pourrait être à l'avenir une alternative économique, continuellement améliorée par la communauté. un peu comme c'est le cas pour le protocole de contrôle ExpressLRS (ELRS). Actuellement, la technique n'est toutefois pas encore assez mûre pour tirer le maximum de l'expérience FPV. Des progrès doivent encore être réalisés, en particulier dans des domaines tels que la latence et la stabilité, pour pouvoir rivaliser avec les systèmes établis.
Néanmoins, OpenIPC montre le potentiel des projets open source pour influencer le marché FPV et créer des possibilités alternatives pour les pilotes d'adapter et de personnaliser leurs systèmes.
Bien qu'OpenIPC soit encore en cours de développement en tant que micrologiciel open source, il existe déjà quelques produits FPV intéressants qui peuvent être utilisés en combinaison avec ce logiciel. Deux produits en particulier ont fait sensation au sein de la communauté FPV : EMAX Wyvern Link et RunCam WiFiLink. Les deux systèmes sont basés sur OpenIPC, ce qui en fait des options passionnantes pour les pilotes FPV désireux d'expérimenter.
Remarque : il n'existe actuellement que des versions alpha des systèmes que nous présentons ci-dessous. Il ne faut pas s'attendre à un produit de haute qualité et sans défaut. Les fabricants lancent ces systèmes sur le marché pour permettre à davantage de personnes de développer des systèmes OpenIPC. Et justement pas pour vendre un produit parfait.
EMAX Wyvern Link est un émetteur vidéo numérique (VTX) et un récepteur (VRX) compatibles OpenIPC, conçus pour les pilotes FPV qui cherchent une alternative abordable aux systèmes FPV numériques propriétaires. Dans sa version la plus puissante, le récepteur offre une puissance de transmission maximale allant jusqu'à 2W, ce qui, en combinaison avec l'émetteur le plus puissant (800mW), devrait permettre une portée et une stabilité significatives du flux vidéo. Et oui, le récepteur émet également dans les systèmes numériques et inversement. C'est pourquoi, comme l'a déjà dit Joshua Bardwell, nous préférons appeler le récepteur Groundunit et l'émetteur Airunit.
EMAX est également le seul fabricant dans le domaine FPV à proposer quatre produits OpenIPC différents. Parmi eux, on trouve, outre les composants puissants décrits ci-dessus, des produits moins chers que l'on utiliserait plutôt pour des petits copters qui ont besoin de moins de puissance lors de la transmission.
La qualité d'image est actuellement limitée à 720p (120fps) à environ 4 Mbps, ce qui est nettement inférieur aux systèmes haute résolution de DJI ou Walksnail (25-50 Mbps). Cela entraîne des blocages dans les scènes de mouvement et réduit la netteté de l'image lors de manœuvres rapides.

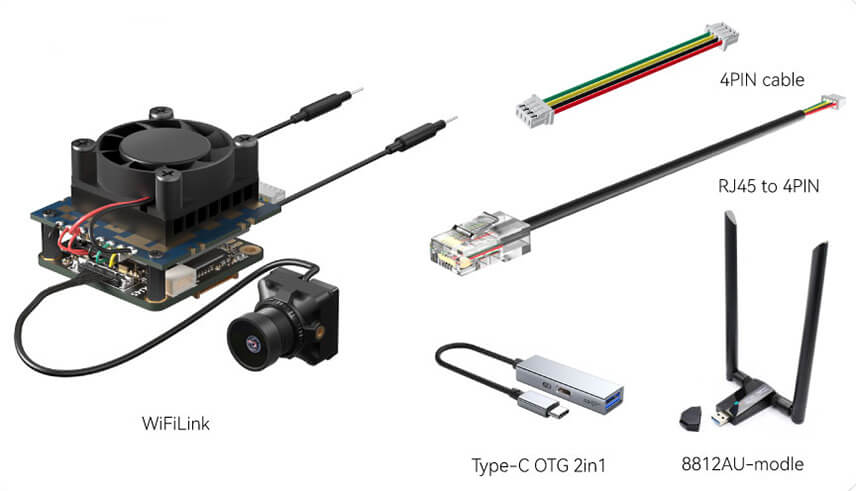
RunCam WiFiLink est un autre produit compatible OpenIPC qui mise sur la technologie de streaming vidéo basée sur le WiFi. Du point de vue de la transmission, il est assez similaire au système EMAX, mais offre également la possibilité d'une transmission Full HD. Dans ce cas, le taux de rafraîchissement est toutefois réduit à 60fps.
Comme pour l'EMAX, le système n'est pas encore adapté aux applications professionnelles, car les solutions basées sur le WiFi sont plus sensibles aux problèmes de latence et aux coupures de signal que les connexions radio traditionnelles de 5,8 GHz.
Dans le cas de la RunCam WiFiLink, la station terrestre a également un aspect légèrement différent de celui de l'EMAX. La réception se fait via un module WiFi "classique-actif", qui est connecté à un smartphone via USB OTG et qui restitue l'image reçue.
Globalement, OpenIPC offre une latence acceptable d'environ 25 ms, ce qui est proche de DJI FPV V1. Pour les pilotes qui souhaitent expérimenter plus au-delà de la technique, EMAX et RunCam offrent ainsi des plateformes prometteuses, mais qui ne fonctionnent pas actuellement au même niveau de stabilité que les systèmes établis.
Pour aider au développement d'OpenIPC, la communauté peut s'impliquer de différentes manières :
Les utilisateurs peuvent installer OpenIPC sur des appareils compatibles et le tester en détail. Les commentaires sur les bugs, les variations de performance ou les possibilités d'amélioration sont essentiels pour optimiser le firmware. De tels commentaires peuvent être partagés directement sur des plateformes telles que GitHub ou des forums FPV spécifiques.
Ceux qui ont de l'expérience en programmation (notamment en C, C++ ou Python) peuvent contribuer activement à l'amélioration du code. OpenIPC est un projet open source accessible au public sur GitHub. Les développeurs peuvent ajouter de nouvelles fonctionnalités, corriger les erreurs existantes et améliorer la documentation.
Le soutien par des contributions financières aide l'équipe OpenIPC à faire avancer le développement, à effectuer des tests de matériel et à couvrir les frais de serveur.
La participation aux forums, aux réseaux sociaux et aux groupes Discord aide à diffuser les connaissances et à aider les autres utilisateurs à installer et à utiliser OpenIPC. Ce type d'entretien de la communauté est indispensable pour créer une communauté d'utilisateurs croissante.
Pour conclure, nous sommes impatients de voir où va le voyage des systèmes OpenIPC dans le monde FPV. Quels produits seront disponibles, quels fabricants se joindront au thème et à quel point les produits OpenIPC seront compétitifs par rapport aux systèmes établis comme DJI ou Walksnail. Peut-être que des produits seront bientôt présents dans notre boutique.
Sources : OpenIPC, Oscar Liang, Joshua Bardwell, RunCam, EMAX











