Nouvelle année, nouveau build ! Dans cet article, nous vous montrons comment assembler un drone FPV HD de 5 pouces pour les prises de vue cinématiques et le freestyle, et tout ce dont vous avez besoin pour cela.
Toutes les pièces utilisées sont bien sûr disponibles dans notre boutique et cela nous aide énormément si vous passez par là. Merci à tous !
Ce blog post est également disponible sous forme de vidéo. Il suffit de cliquer sur Play en haut de la page ou d'aller sur notre chaîne YouTube.
Pour la construction de notre drone FPV, nous avons besoin de plusieurs composants importants. Parmi les éléments de base figurent le cadre, qui constitue la structure du drone, et le récepteur, qui reçoit les signaux de commande. Quatre moteurs entraînent les hélices, tandis que l'émetteur vidéo et la caméra transmettent l'image en direct aux lunettes FPV. Le contrôleur de vol, le "cerveau" du drone, et le régulateur, qui gère l'alimentation électrique des moteurs, sont également nécessaires.
Tu as besoin de ces composants pour construire un drone FPV :

Pour recevoir l'image vidéo, nous recommandons les lunettes Walksnail Avatar Goggles X, l'une des lunettes HD FPV les plus populaires. Pour la radiocommande, nous utilisons le Jumper T20 V2. La radio que vous utilisez n'est pas si importante. Elle doit toutefois supporter le protocole de transmission ELRS. La batterie utilisée est une batterie LiPo 6S de China Hobbyline, car nous construisons un coptère compatible 6S.
Voici l'équipement que nous avons utilisé :
Pour la construction, vous avez également besoin d'une sélection d'outils. Un fer à souder est indispensable, de préférence une vraie station de soudage, ainsi que de l'étain à souder. Pour rétrécir les gaines thermorétractables, tu peux utiliser un briquet ou un pistolet à air chaud. Les colliers de serrage sont pratiques pour diverses applications, tout comme une pince à dénuder pour les gros câbles, une pince coupante diagonale et une petite pince à bec pour les petits câbles. Pour monter les hélices, vous avez besoin d'un prop-tool. L'outil le plus important est déjà contenu dans la boîte à outils pratique d'Ethix.
Un outil utile pour chaque pilote FPV :
Maintenant que tout cela est clair, passons à la construction du drone FPV.
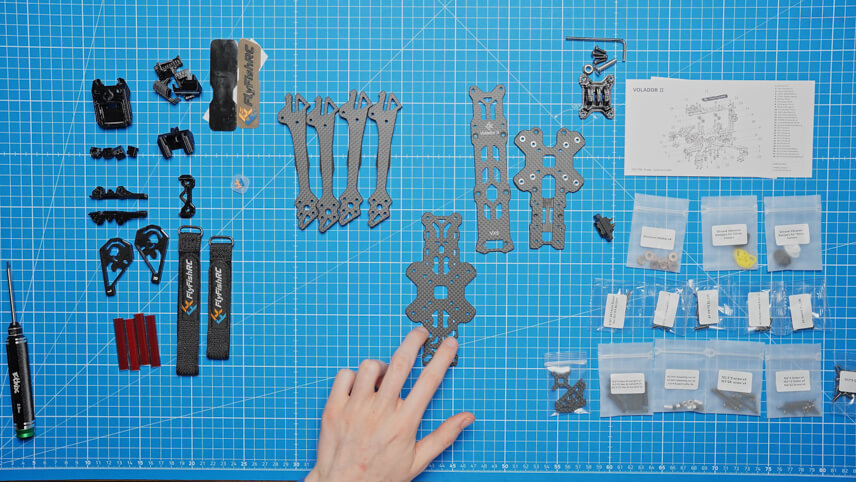
Commençons par le montage du cadre. Déballez d'abord toutes les pièces afin d'avoir une bonne vue d'ensemble. Dispose les quatre bras du frame de manière à ce qu'ils forment une croix au milieu. Une petite pièce positive aide à fixer les bras au milieu, ce qui facilite le vissage ultérieur. Appuie fermement sur cette pièce plus au centre pour que les bras soient bien serrés les uns contre les autres.
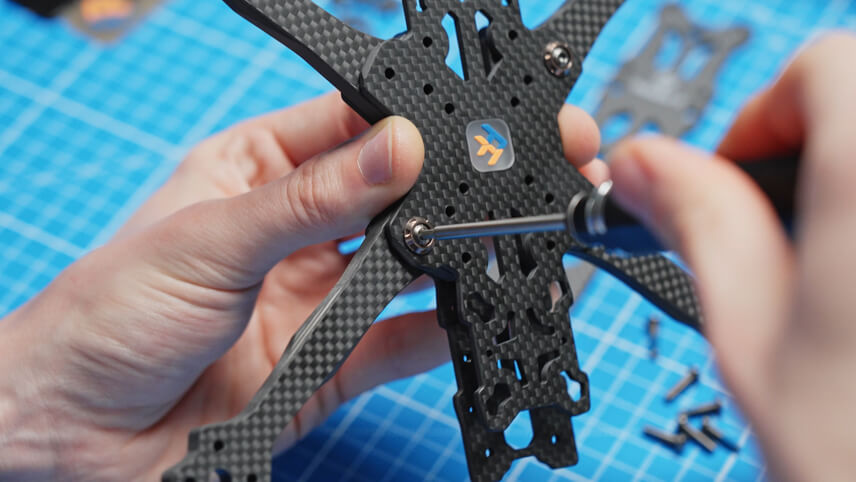
Pour la fixation des bras, tu as besoin de vis M3x12. Retourne le copieur et fais attention à bien placer le logo FlyFish. Utilise des rondelles en aluminium pour fixer les bras. Utilise d'abord les trous extérieurs, puis les vis M3x28 plus longues pour les trous intérieurs. Laissez d'abord ces vis libres jusqu'à ce que toutes les vis soient montées, puis serrez-les.
Dès que toutes les vis sont serrées, les premières pièces en TPU imprimées en 3D entrent en jeu. Commencez par monter un support d'antenne à l'arrière. Utilisez des vis M2x12 et un tournevis hexagonal de 1,5 mm pour visser le support par le bas dans le cadre. Ici aussi, il faut tout laisser libre et ne serrer qu'à la fin.
Ensuite, nous montons le support de la caméra. Celui-ci se compose de deux plaques de carbone, de deux pièces en aluminium et d'une petite lèvre en TPU. Commence par enfoncer les plaques de carbone dans le cadre. Ensuite, vous fixez les pièces en aluminium sur les plaques en carbone, mais vous les vissez sans trop les serrer pour que la caméra puisse encore passer entre elles.

C'est maintenant le tour des standoffs, les entretoises pour les différents niveaux du cadre. Il en existe de différentes tailles : des grandes, des un peu plus petites et des toutes petites pour le support du GPS. Fixe d'abord les grands standoffs dans le cadre par le haut avec des vis M3x16. Deux sont placées au milieu du cadre et deux autres à l'arrière. Les petits stand-offs, que vous fixez avec des vis M2,5x9, sont placés à l'arrière.
Nous préparons maintenant les moteurs. Nous utilisons des moteurs iFlight Xing2 2306 avec 1755 KV. Tout d'abord, tu presses les protège-bras en TPU sur les bras du frame pour protéger le carbone et les moteurs. Ensuite, prenez un moteur, tenez-le contre le bras et vissez lentement les premières vis. Veillez à ce que le moteur soit bien droit sur le bras afin de ne pas endommager le filetage. Veillez également à ce que les vis ne touchent pas les spires du moteur. Répétez cette étape pour les quatre moteurs.

C'est maintenant au tour du contrôleur de vol et du régulateur. Commence par tout sortir de l'emballage : le connecteur XT60, les vis, les câbles de rechange et les amortisseurs en silicone. Le contrôleur, également appelé ESC, est la puce à laquelle tous les moteurs sont connectés. Le contrôleur de vol est le "cerveau" du drone, sur lequel tous les composants seront connectés par la suite.
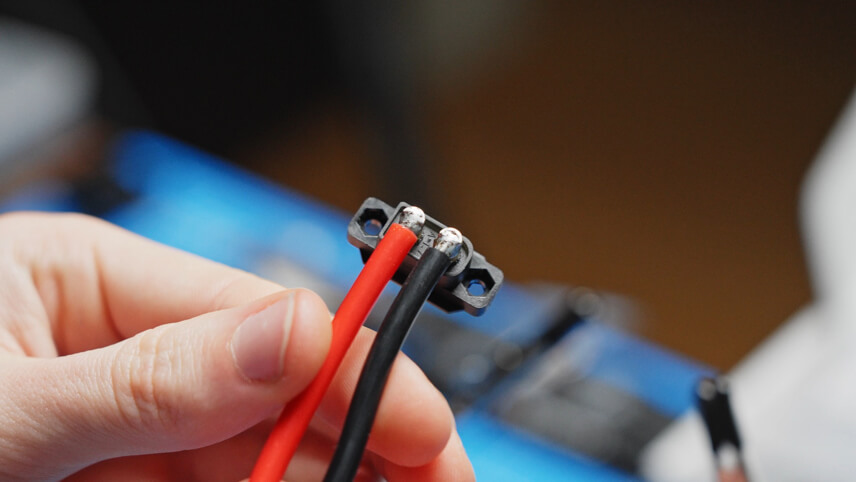
Pour raccorder les câbles du connecteur XT60 à un angle de 90°, nous commençons par pré-souder les contacts du connecteur. Nous utilisons d'ailleurs le connecteur XT60 qui était fourni avec le frame.
Les câbles sont également pré-étamés. Ensuite, tu soudes les câbles aux contacts du connecteur XT60. Veille à ce que rien ne se touche entre les deux contacts.
Le condensateur est placé dans le cadre par le bas, le plus étant soudé au plus et le moins au moins. Nous avons dû nous procurer un condensateur plus petit (en termes de taille), car celui de l'ESC ne rentre pas dans le cadre.
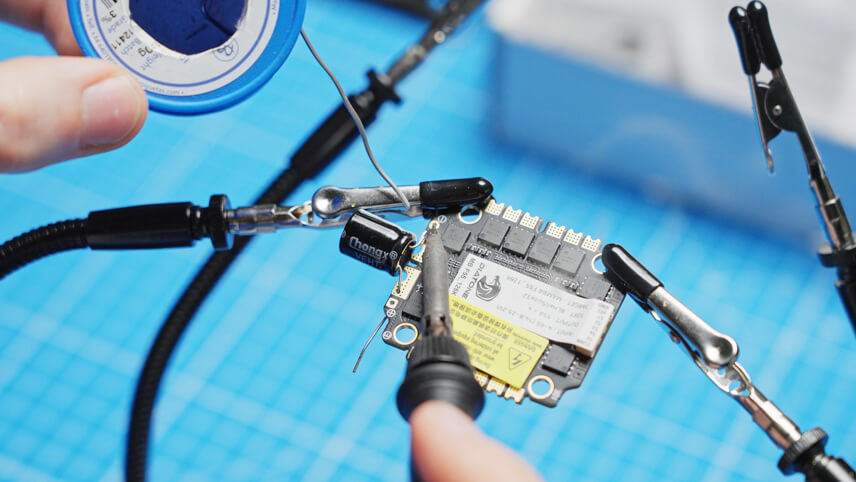
Coupez les pattes du condensateur qui dépassent. Ensuite, tu peux préparer les points de soudure pour les câbles d'alimentation sur l'ESC et souder également les câbles d'alimentation.
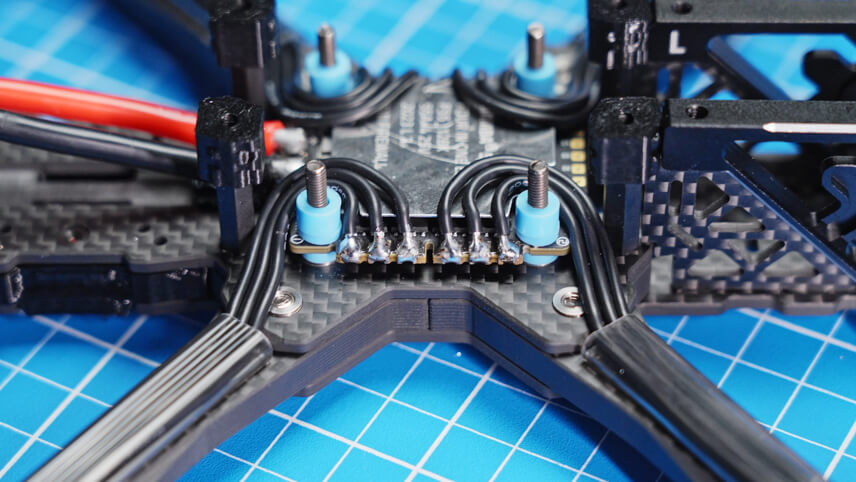
Maintenant, nous montons l'ESC dans le cadre. Pour ce faire, les amortisseurs en silicone sont tirés à travers les trous du cadre. Les trois connexions par moteur sont pré-soudées. Ensuite, tu installes les protections des câbles du moteur et tu passes les câbles à travers ces protections avant de les souder à l'ESC. Il est important que les câbles ne se touchent pas et qu'ils soient uniquement reliés à la pastille de soudure correspondante.
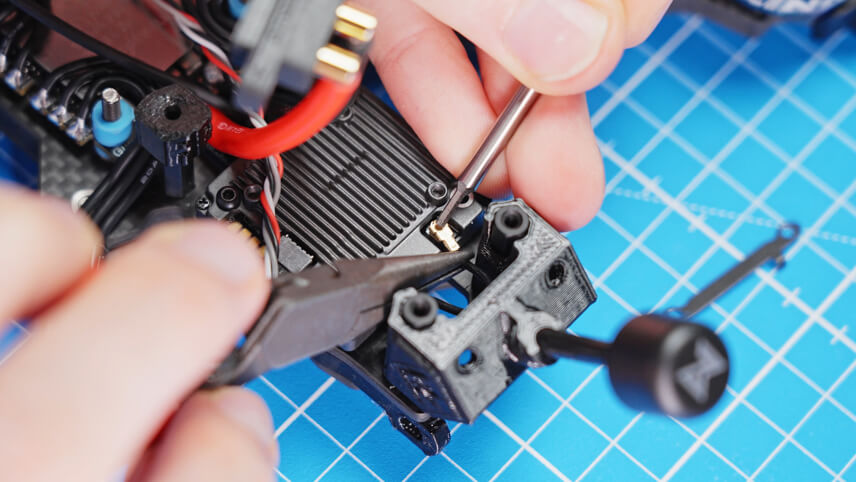
La prochaine étape est le système d'émetteur vidéo. Nous utilisons le kit Walksnail Avatar HD V2, composé d'une antenne, d'un émetteur vidéo et d'une caméra. L'émetteur vidéo est monté à l'arrière du cadre, la caméra vient à l'avant. Les câbles sont posés de manière à ce que l'émetteur vidéo puisse être positionné correctement. Utilise les vis et les rondelles fournies pour fixer l'émetteur vidéo.
Retire la plaque de protection de l'émetteur vidéo pour exposer le connecteur U.FL. Fixe l'antenne dans le support et connecte l'antenne à l'émetteur vidéo. Remonte la plaque et serre les vis.
Pour relier l'émetteur vidéo au contrôleur de vol, soude le câble rouge au pad 9V, le câble noir au pad GND, le câble TX gris au pad RX3 et le câble RX blanc au pad TX3 du contrôleur de vol. Veille à ce que RX et TX soient correctement connectés afin de garantir une communication fluide. Tu trouveras le schéma exact dans les instructions du FC et de l'émetteur vidéo.
L'émetteur vidéo est maintenant installé et le connecteur XT60 peut être enfoncé à l'arrière sur les Standoff.
Place les amortisseurs en silicone sur le côté du contrôleur de vol et relie le câble du contrôleur au contrôleur de vol. Installe le contrôleur de vol dans le cadre et fixe-le avec les écrous fournis.
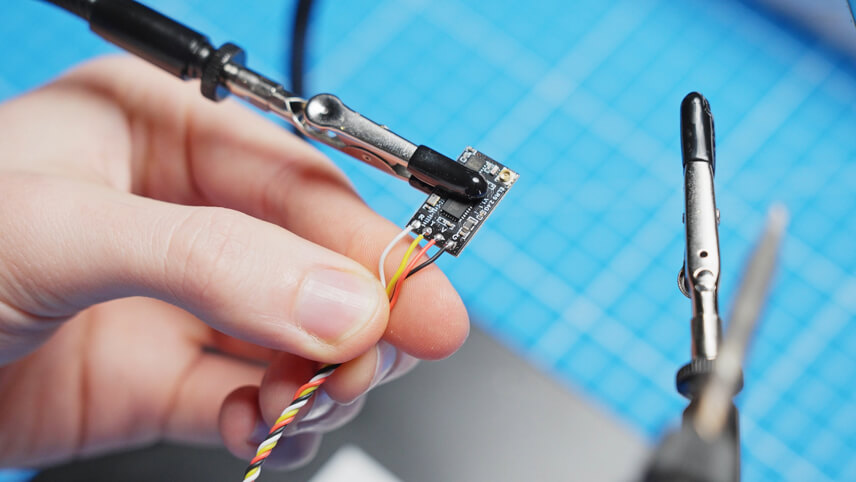
Nous allons maintenant installer le récepteur. Nous utilisons un récepteur ELRS qui se connecte de manière similaire à l'émetteur vidéo. Consulte le mode d'emploi pour connaître l'affectation correcte des connexions. Normalement, les connexions sont GND (noir), 5V (rouge), TX (gris) et RX (blanc). Ces câbles sont soudés au connecteur UART1 du contrôleur de vol : TX à RX, RX à TX, 5V à 5V et GND à GND. La gaine thermorétractable protège à la fois la carte et les câbles. Montez le récepteur derrière la caméra en tirant l'antenne sous la caméra et fixez le tout avec des attaches de câbles. Vous pouvez également utiliser du ruban adhésif double face.
L'étape suivante consiste à monter la plaque supérieure. Pour cela, on utilise différentes vis : à l'arrière, les vis M2,5, au milieu, les vis à tête fraisée et à l'avant, les vis à tête plus large pour le support GoPro. Ces vis spéciales empêchent le TPU de s'arracher en cas de chute. Serre toutes les vis, mais n'en fais pas trop pour ne pas les endommager. Installe également le pad de la batterie en l'orientant correctement et en le serrant pour éviter que la batterie ne glisse.
Avant de passer à la configuration du logiciel, testons l'électronique. Connecte un smoke stop entre la batterie et le drone afin de détecter d'éventuelles erreurs de connexion sans endommager les composants. Lorsque toutes les LED du récepteur, du contrôleur de vol et de l'émetteur vidéo sont allumées, vous êtes prêt pour la configuration.

Pour configurer le copilote, vous avez besoin de deux logiciels sur votre ordinateur : le configurateur ExpressLRS pour le récepteur et le configurateur Betaflight pour le contrôleur de vol.
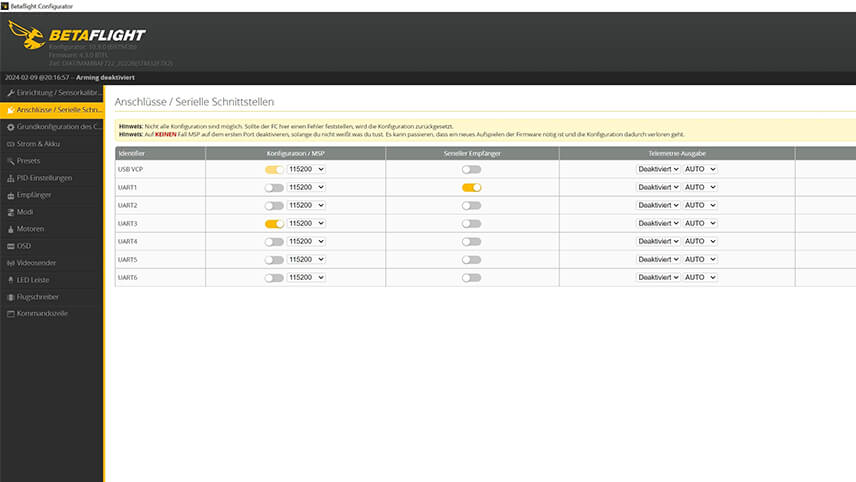
Démarrez avec Betaflight. Connectez-vous au contrôleur de vol et assurez-vous que le récepteur est configuré sur UART1 et l'émetteur vidéo sur UART3. Activez les connexions correspondantes et enregistrez la configuration.
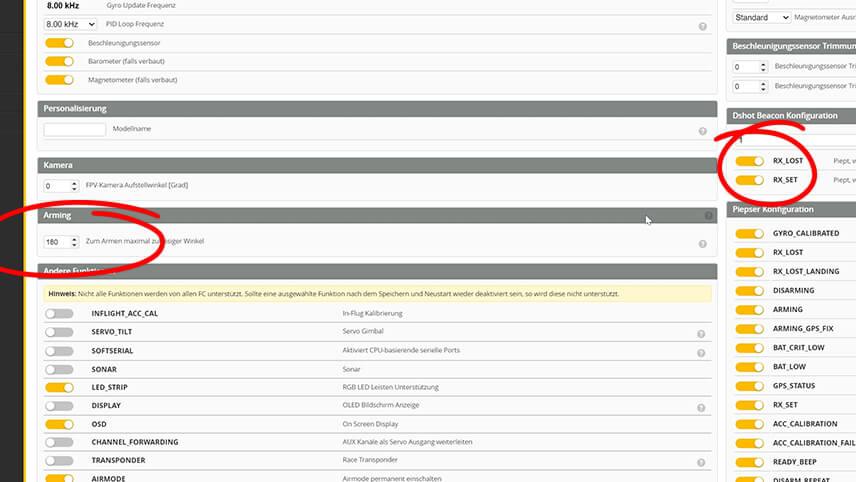
Dans la configuration de base, fixe l'angle de bras à 180° pour que le drone puisse décoller dans n'importe quelle direction. Active RX_LOST et RX_SET pour que les moteurs bipent en cas de perte de connexion. Enregistre les paramètres. Sous "Récepteurs", sélectionne CRSF, le protocole des récepteurs ELRS.
Passez au configurateur ExpressLRS. Choisis la bonne version et le récepteur qui convient. Connectez-vous et installez le micrologiciel. Cela peut prendre quelques minutes. Si l'installation est réussie, tu peux revenir à Betaflight et tester la connexion. Déplace les sticks sur la radiocommande et vérifie que les débattements sont visibles dans Betaflight.
Passe aux modes de vol dans Betaflight et ajoute le mode pré-bras, le mode bras et le mode angle. Affecte les interrupteurs correspondants sur ta télécommande en cliquant sur "Ajouter une plage" et en déplaçant les interrupteurs. Assure-toi que les zones sont correctement définies de sorte que les modes ne soient actifs que lorsque les interrupteurs sont déplacés. Enregistre les paramètres et teste si les interrupteurs s'affichent correctement dans Betaflight lorsque tu les déplaces sur la télécommande.
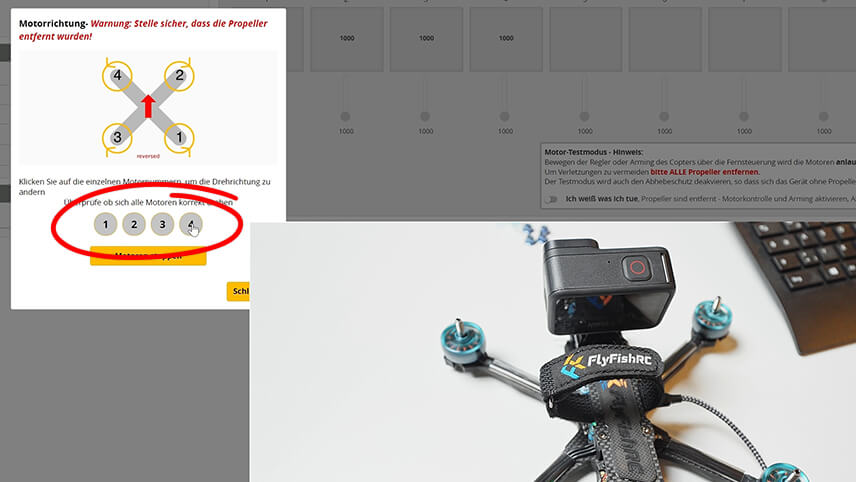
Dans l'onglet "Moteurs" de Betaflight, vérifie le sens de rotation des moteurs. Assure-toi que les hélices sont retirées et active l'interrupteur qui débloque la commande des moteurs. Connecte la batterie et coche la case "Inverser les moteurs". Car nous voulons le sens de rotation des props out. Teste le sens de rotation des moteurs et clique sur le numéro de chaque moteur pour changer le sens de rotation s'il n'est pas correct. Enregistre les paramètres et assure-toi que tous les moteurs tournent comme prévu.
Dans l'OSD (On-Screen Display), règle les éléments qui doivent être affichés dans les lunettes. Active la tension moyenne des cellules, le mode de vol, les minuteries 1 et 2, ainsi que la valeur RSSI et la qualité de la connexion. Règle le format vidéo sur HD afin d'afficher les éléments aux bons endroits.
Pour finir, il faut encore connecter les lunettes et l'émetteur vidéo. Allume le drone et attends que l'émetteur vidéo clignote en vert. Appuie ensuite sur le petit bouton de l'émetteur vidéo et des lunettes jusqu'à ce que les deux soient connectés.

Pour finir, monte les hélices. Nous utilisons des hélices Gemfan Hurricane de couleur bleue. Affecte les hélices de manière à ce qu'elles tournent vers l'extérieur afin de ne pas projeter de saletés dans la caméra. Cela correspond au sens de rotation du moteur défini précédemment. Fixe les hélices à l'aide des écrous fournis et serre-les avec l'outil d'hélice.

Vous êtes maintenant prêts pour le premier vol d'essai ! Allume la télécommande, alimente les lunettes en électricité et connecte la batterie au drone. en vol, vérifie le bruit du drone et fais attention à ne pas entendre de vibrations inhabituelles. Surveille la tension de la batterie afin de ne pas la décharger trop profondément. Si tout se passe bien, vous avez réussi à construire votre propre drone FPV !
Si vous avez besoin de conseils supplémentaires pour votre premier vol, regardez notre vidéo à ce sujet. Vous trouverez toutes les pièces et tous les outils dans notre boutique. Amusez-vous bien en volant et n'hésitez pas à nous laisser un "like" et un abonnement !