¡Año nuevo, montaje nuevo! En este artículo, te mostraremos cómo montar un dron FPV HD de 5 pulgadas para tomas cinemáticas y estilo libre y qué necesitas para ello.
Por supuesto, todas las piezas utilizadas están disponibles en nuestra tienda y nos ayuda enormemente que te pases por ella. Muchas gracias
Esta entrada del blog también está disponible como un video. Sólo tienes que hacer clic en reproducir arriba o echar un vistazo a nuestro canal de YouTube.
Necesitamos varios componentes importantes para construir nuestro dron FPV. Los componentes básicos son el chasis, que forma la estructura del dron, y el receptor, que recibe las señales de control. Cuatro motores accionan las hélices, mientras que el transmisor de vídeo y la cámara transmiten la imagen en directo a las gafas FPV. También son necesarios el controlador de vuelo, el "cerebro" del dron, y el mando, que controla la alimentación de los motores.
Necesitas estos componentes para construir un dron FPV:

Para recibir la imagen de vídeo, recomendamos las Walksnail Avatar Goggles X, una de las gafas FPV HD más populares. Para el mando a distancia utilizamos el Jumper T20 V2. La radio que utilices exactamente no es tan importante. Sin embargo, debe soportar el protocolo de transmisión ELRS. La batería utilizada es una batería LiPo 6S de China Hobbyline, ya que estamos construyendo un copter compatible con 6S.
Este es el equipo que utilizamos
También necesitarás una selección de herramientas para la construcción. Un soldador es esencial, preferiblemente una estación de soldadura adecuada, así como soldadura. Se puede utilizar un mechero o una pistola de calor para encoger el tubo termorretráctil. Las bridas para cables son prácticas para diversas aplicaciones, al igual que los pelacables para los cables más grandes, los alicates de corte lateral y los alicates de punta pequeña para los cables más pequeños. Necesitarás una herramienta de utilería para montar las hélices. La herramienta más importante ya está incluida en el práctico maletín de herramientas Ethix.
Una herramienta útil para todo piloto FPV:
Ahora que ya nos hemos quitado esto de encima, es hora de construir el dron FPV.
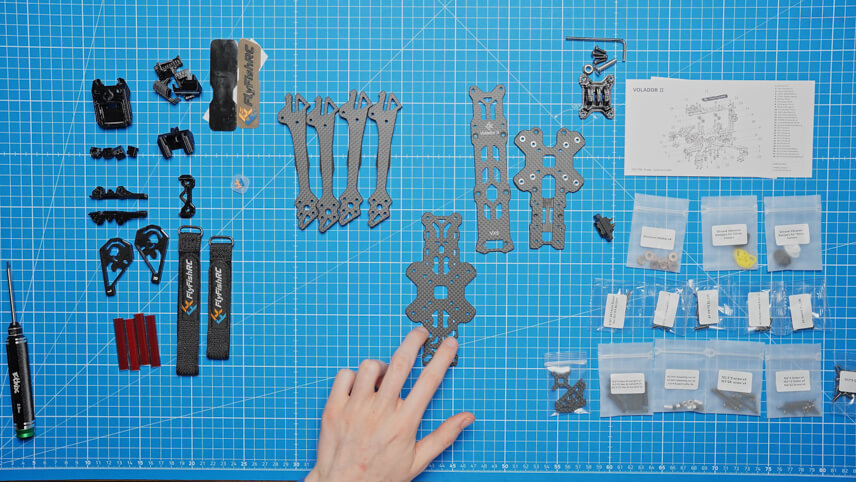
Empecemos por montar el frame. En primer lugar, desempaqueta todas las piezas para tener una buena visión de conjunto. Coloca los cuatro brazos de la estructura de forma que formen una cruz en el centro. Una pequeña pieza adicional ayuda a fijar los brazos en el centro, lo que facilita el atornillado posterior. Presiona firmemente esta pieza en el centro para que los brazos queden juntos.
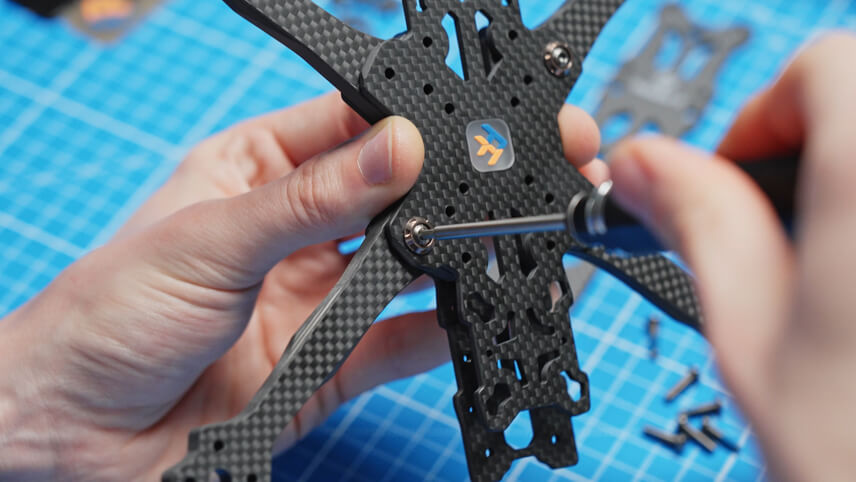
Necesitarás tornillos M3x12 para fijar los brazos. Dale la vuelta al helicóptero y asegúrate de que el logotipo de FlyFish está colocado correctamente. Utilice arandelas de aluminio para fijar los brazos. Utilice primero los agujeros exteriores y luego los tornillos M3x28 más largos para los agujeros interiores. Deje estos tornillos sueltos hasta que todos los tornillos estén colocados, luego apriételos.
En cuanto todos los tornillos estén apretados, entrarán en juego las primeras piezas de TPU impresas en 3D. En primer lugar, monta un soporte de antena en la parte trasera. Utiliza tornillos M2x12 y un destornillador hexagonal de 1,5 mm para atornillar el soporte en el marco desde abajo. De nuevo, deja todo suelto y aprieta sólo al final.
A continuación, montamos el soporte de la cámara. Consta de dos placas de carbono, dos piezas de aluminio y un pequeño labio de TPU. Primero presiona las placas de carbono en el marco. A continuación, fija las piezas de aluminio a las placas de carbono, pero atorníllalas sólo ligeramente para que la cámara quepa entre ellas.

Ahora es el momento de los standoffs, los espaciadores para los diferentes niveles del marco. Hay diferentes tamaños: grandes, ligeramente más pequeños y muy pequeños para el soporte del GPS. En primer lugar, fija los separadores grandes al marco desde arriba con tornillos M3x16. Coloca dos en el centro del marco y otros dos en la parte posterior. Los separadores más pequeños, que se fijan con tornillos M2,5x9, van en la parte trasera.
Ahora preparamos los motores. Nosotros usamos motores iFlight Xing2 2306 con 1755 KV. Primero presiona los protectores de brazo de TPU sobre los brazos del frame para proteger el carbono y los motores. Después coge un motor, sujétalo al brazo y aprieta lentamente los primeros tornillos. Asegúrate de que el motor se asienta recto sobre el brazo para no dañar la rosca. Asegúrate también de que los tornillos no tocan los bobinados del motor. Repita este paso para los cuatro motores.

Ahora es el turno de la controladora de vuelo y el ESC. Primero saca todo del embalaje: el conector XT60, los tornillos, los cables de repuesto y los amortiguadores de silicona. La controladora, también conocida como ESC, es el chip al que se conectan todos los motores. El controlador de vuelo es el "cerebro" del dron, al que luego se conectan todos los componentes.
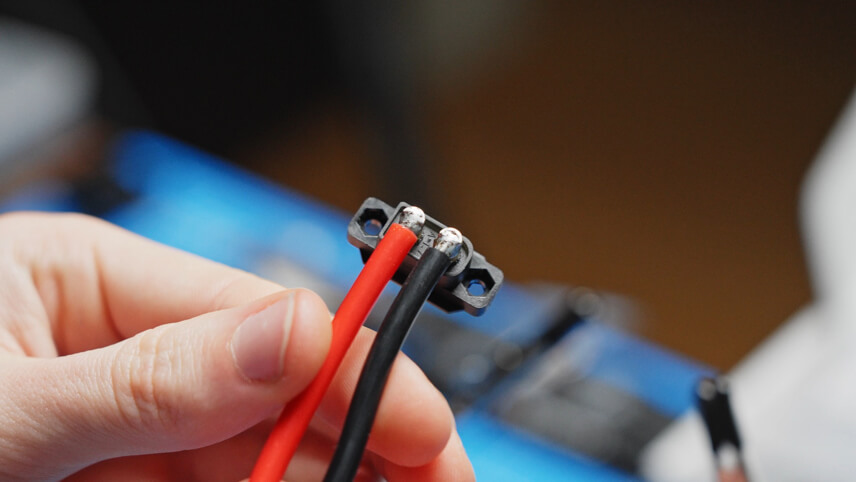
Para conectar los cables del conector XT60 en un ángulo de 90°, primero soldamos previamente los contactos del conector. Por cierto, utilizamos el conector XT60 que venía con la estructura.
Los cables también están preestañados. A continuación, soldamos los cables a los contactos del conector XT60. Asegúrate de que nada toque entre los dos contactos.
El condensador se coloca en el marco desde abajo, con el positivo soldado al positivo y el negativo al negativo. Tuvimos que conseguir un condensador más pequeño (en cuanto a tamaño) ya que el del ESC no cabe en el marco.
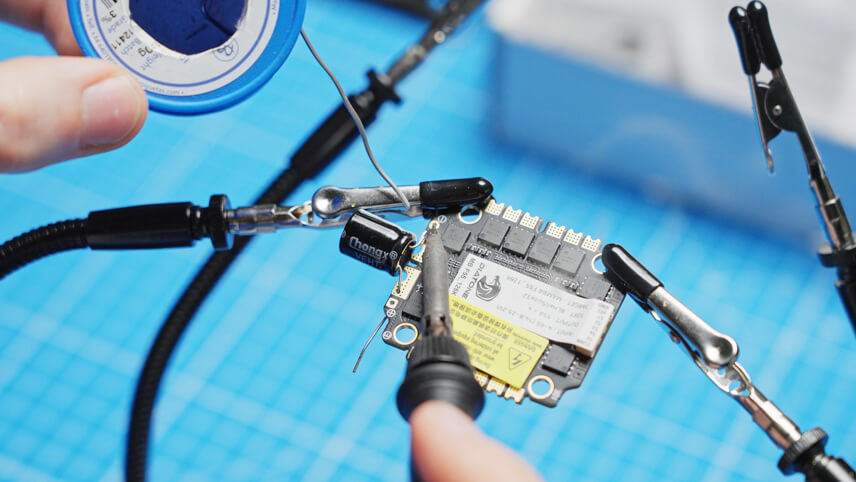
Corta las patas que sobresalen del condensador. A continuación puedes preparar los puntos de soldadura para los cables de alimentación en el ESC y soldar también los cables de alimentación.
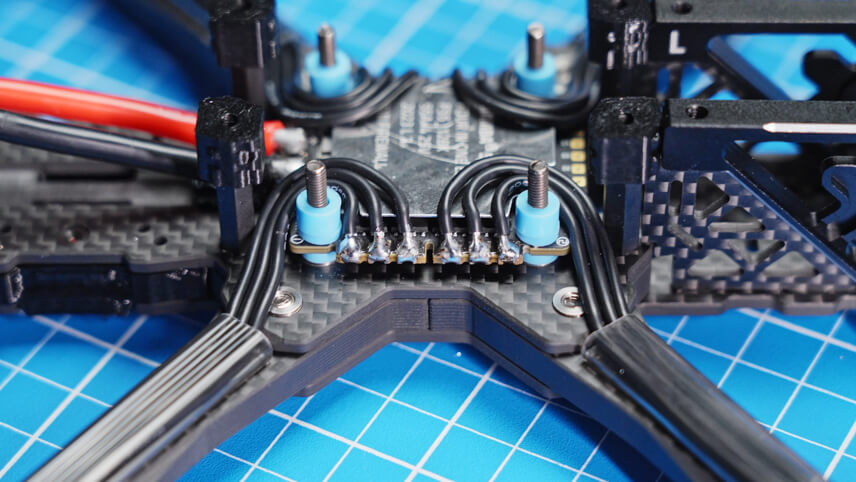
Ahora montamos el ESC en el cuadro. Para ello, tira de los amortiguadores de silicona a través de los agujeros del chasis. Las tres conexiones por motor están pre-soldadas. A continuación, coloca los protectores de los cables del motor e inserta los cables a través de estos protectores antes de soldarlos al ESC. Es importante que los cables no se toquen entre sí y sólo se conecten a la respectiva almohadilla de soldadura.
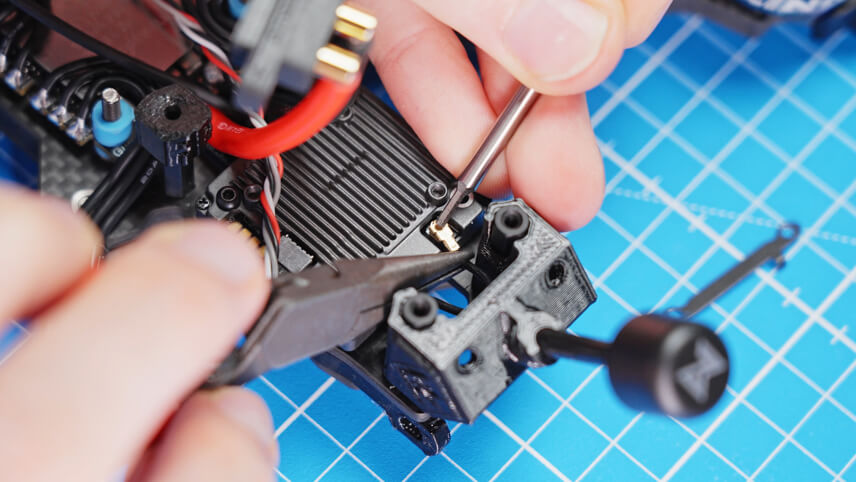
El siguiente paso es el sistema transmisor de vídeo. Nosotros utilizamos el Walksnail Avatar HD Kit V2, que consta de antena, transmisor de vídeo y cámara. El transmisor de vídeo se monta en la parte trasera del marco y la cámara en la parte delantera. Los cables se tienden de forma que el transmisor de vídeo pueda colocarse correctamente. Utilice los tornillos y arandelas suministrados para atornillar el transmisor de vídeo.
Retire la cubierta del transmisor de vídeo para dejar a la vista la conexión U.FL. Fije la antena al soporte y conecte la antena al transmisor de vídeo. Vuelva a colocar la placa y apriete los tornillos.
Para conectar el transmisor de vídeo al controlador de vuelo, suelde el cable rojo a la pastilla 9V, el cable negro a la pastilla GND, el cable TX gris a la pastilla RX3 y el cable RX blanco a la pastilla TX3 del controlador de vuelo. Asegúrate de que RX y TX están conectados correctamente para asegurar una comunicación fluida. El diagrama exacto se encuentra en las instrucciones del FC y del transmisor de vídeo.
El transmisor de vídeo ya está totalmente instalado y el conector XT60 puede colocarse a presión en los separadores de la parte trasera.
Inserte los amortiguadores de silicona en el lateral del controlador de vuelo y conecte el cable del controlador al controlador de vuelo. Monte el controlador de vuelo en el marco y asegúrelo con las tuercas suministradas.
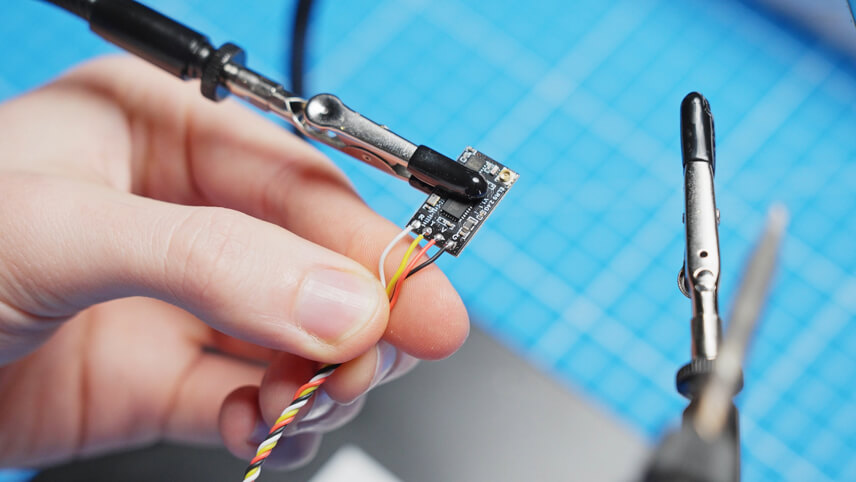
Ahora se instala el receptor. Nosotros utilizamos un receptor ELRS, que se conecta de forma similar al transmisor de vídeo. Consulta las instrucciones para encontrar la asignación correcta de las conexiones. Normalmente las conexiones son GND (negro), 5V (rojo), TX (gris) y RX (blanco). Estos cables se sueldan a la conexión UART1 del controlador de vuelo: TX a RX, RX a TX, 5V a 5V y GND a GND. El tubo termoretráctil protege tanto la placa como los cables. Monta el receptor detrás de la cámara tirando de la antena por debajo de la cámara y asegurándolo todo con bridas para cables. También puedes utilizar cinta adhesiva de doble cara.
El siguiente paso es montar la placa superior. Para ello se utilizan varios tornillos: tornillos de M2,5 en la parte trasera, tornillos avellanados en el centro y tornillos con una cabeza más ancha para el soporte de la GoPro en la parte delantera. Estos tornillos especiales evitan que el TPU se desgarre en caso de caída. Aprieta todos los tornillos, pero no te excedas para evitar daños. Monta también la almohadilla de la batería alineándola correctamente y presionándola hacia abajo para evitar que la batería se deslice.
Antes de pasar a la configuración del software, vamos a probar la electrónica. Conecta un tapón de humo entre la batería y el dron para detectar cualquier desconexión sin dañar los componentes. Cuando todos los LED del receptor, el controlador de vuelo y el transmisor de vídeo se enciendan, estarás listo para la configuración.

Para configurar el helicóptero, necesitarás dos programas en tu ordenador: el configurador ExpressLRS para el receptor y el configurador Betaflight para el controlador de vuelo.
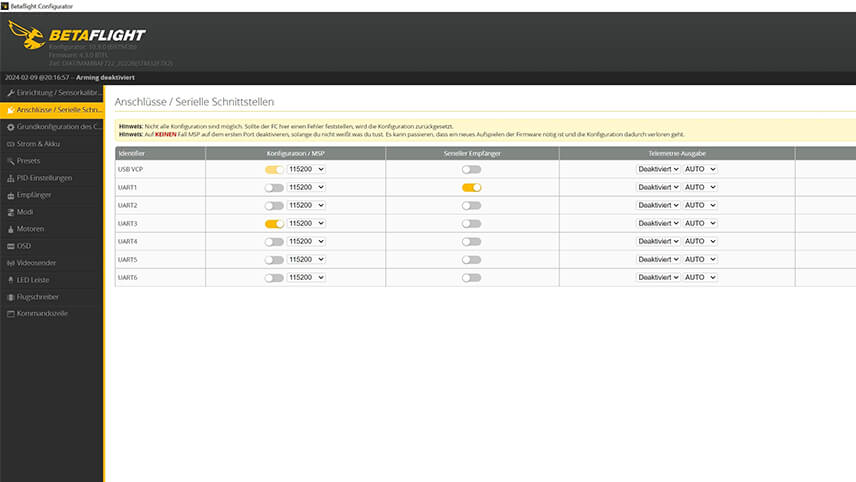
Empieza con Betaflight. Conéctate a la controladora de vuelo y asegúrate de que el receptor está configurado en UART1 y el transmisor de vídeo en UART3. Activa las conexiones correspondientes y guarda la configuración.
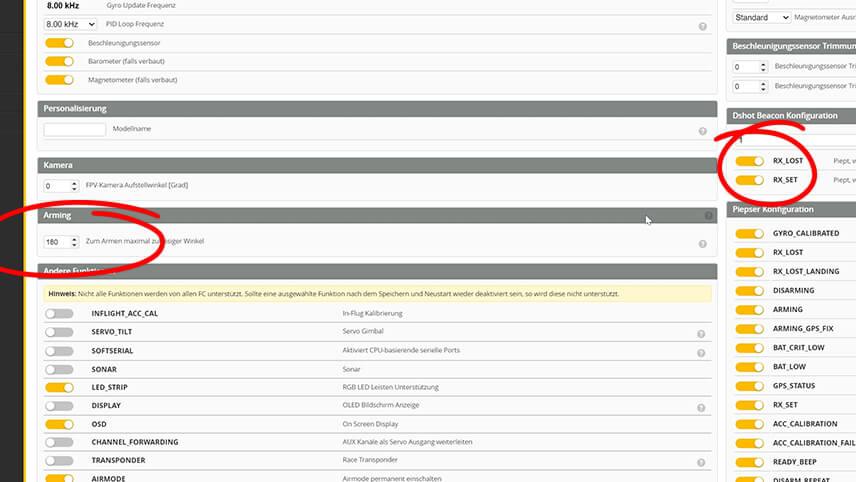
En la configuración básica, ajusta el ángulo de armado a 180º para que el dron pueda despegar en cualquier dirección. Activa RX_LOST y RX_SET para que los motores emitan un pitido si se pierde la conexión. Guarda los ajustes. En "Receptor", selecciona CRSF, el protocolo del receptor ELRS.
Cambie al configurador ExpressLRS. Seleccione la versión correcta y el receptor adecuado. Conecte e instale el firmware. Esto puede tardar unos minutos. Si la instalación se ha realizado correctamente, puedes volver a Betaflight y probar la conexión. Mueve los sticks del mando a distancia y comprueba si las desviaciones son visibles en Betaflight.
Cambie a los modos de vuelo en Betaflight y añada los modos Pre-Arm, Arm y Angle. Asigne los interruptores correspondientes en su mando a distancia haciendo clic en "Añadir rango" y moviendo los interruptores. Asegúrate de que los rangos están configurados correctamente para que los modos sólo estén activos cuando los conmutadores estén activados. Guarde los ajustes y compruebe si los interruptores se muestran correctamente en Betaflight al moverlos en el mando a distancia.
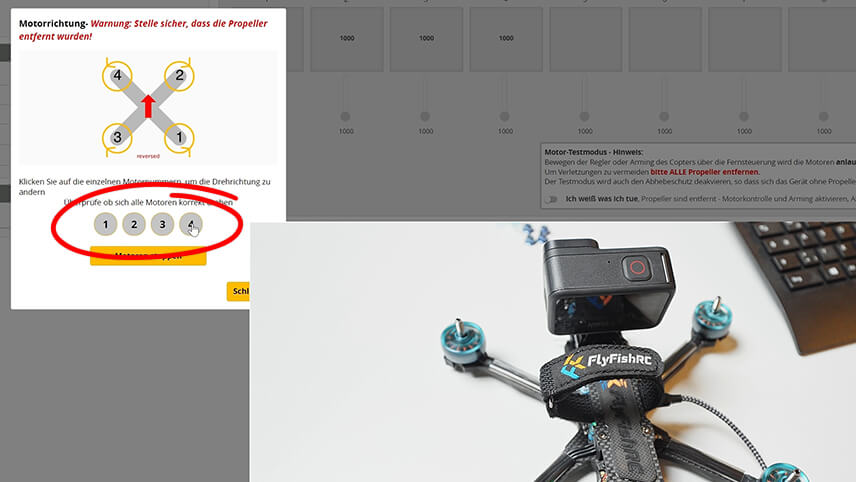
En la pestaña "Motores" de Betaflight, compruebe el sentido de giro de los motores. Asegúrate de que las hélices están desmontadas y activa el interruptor que habilita el control de los motores. Conecta la batería y marca la casilla "Invertir motores". Porque queremos que las hélices giren en sentido contrario. Comprueba el sentido de giro de los motores y haz clic en el número del motor correspondiente para cambiar el sentido de giro si no es correcto. Guarde los ajustes y asegúrese de que todos los motores giran como es debido.
En el OSD (On-Screen Display), configure los elementos que se mostrarán en las gafas. Active la tensión media de la célula, el modo de vuelo, el temporizador 1 y 2, así como el valor RSSI y la calidad de la conexión. Ajusta el formato de vídeo a HD para visualizar los elementos en los lugares adecuados.
Por último, es necesario conectar las gafas y el transmisor de vídeo. Enciende el dron y espera a que el transmisor de vídeo parpadee en verde. A continuación, pulsa el pequeño botón del transmisor de vídeo y el de las gafas hasta que ambos estén conectados.

Por último, monta las hélices. Nosotros utilizamos hélices Gemfan Hurricane de color azul. Disponga las hélices de modo que giren hacia fuera para evitar que arrojen suciedad a la cámara. Esto se corresponde con el sentido de giro del motor determinado previamente. Fije las hélices con las tuercas adjuntas y apriételas con la herramienta para hélices.

Ya está listo para el primer vuelo de prueba Encienda el mando a distancia, alimente las gafas y conecte la batería al dron. comprueba el sonido del dron en vuelo y asegúrate de que no oyes ninguna vibración inusual. Vigila el voltaje de la batería para no descargarla demasiado. Si todo va bien, ¡habrás construido con éxito tu propio dron FPV!
Si necesitas más consejos para tu primer vuelo, echa un vistazo a nuestro vídeo. Puedes encontrar todas las piezas y herramientas en nuestra tienda. Diviértete volando y, por favor, ¡déjanos un like y una suscripción!